Caso de estudio de usuario: MapleSim abre nuevos caminos en la simulación hardware-in-the-loop (HIL) en tiempo real de los Planetary Rovers
- Detalles
- Categoría: MapleSim
- Visto: 6115
En la industria espacial, el diseño, la construcción y las pruebas de los prototipos de rovers son extremadamente caras y normalmente las pruebas del sistema no se realizan hasta que no se alcanza la fase final en el proceso de diseño/prueba, acarreando un tiempo de desarrollo muy extenso. En respuesta a esto, el Dr. Amir Khajepour, titular de la cátedra canadiense de sistemas mecatrónicos para vehículos y catedrático de ingeniería en el departamento de ingeniería mecánica y mecatrónica de la universidad de Waterloo (UW), junto con su equipo trabajaron con la agencia espacial canadiense (CSA) y Maplesoft, para desarrollar una plataforma de prueba con la técnica hardware-in-the-loop (HIL) para los rovers con alimentación solar.
Su método permite la prueba de componentes dentro de un bucle simulado antes de que esté disponible un prototipo completo del rover. Esencialmente crea un entorno virtual de prueba para el componente bajo prueba, “engañándolo” para que piense que está siendo utilizado en un prototipo completamente operativo. Usando MapleSim, la herramienta de modelado y simulación de Maplesoft, se crearon modelos de alta fidelidad y computacionalmente eficientes para esta aplicación en tiempo real.
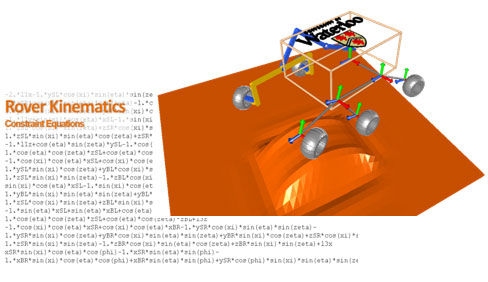
Fig. 1 Generación automática de ecuaciones cinemáticas
Usando esta plataforma de prueba, los escenarios que son difíciles de replicar en una configuración de laboratorio, como el entorno de Marte, o componentes que aún no están disponibles, pueden ser modelados mientras los componentes de hardware que están disponibles pueden comunicarse con estos modelos de software para simulaciones en tiempo real. La meta consiste en ir añadiendo progresivamente los componentes de hardware al bucle de simulación según estén disponibles. De este modo, la prueba del sistema se realiza incluso sin todos los componentes de hardware, puenteando el vacío entre las fases de diseño y de prueba.
La ventaja principal de este enfoque es que reduce significativamente el tiempo total de desarrollo en el proyecto. Además, esto da lugar a pruebas de componentes en entornos hostiles sin el riesgo de dañar un prototipo entero de un rover.
Cinemática de un Rover
Además de la simulación dinámica del rover, el entorno de modelado MapleSim fue utilizado para automáticamente generar las ecuaciones cinemáticas del rover.
Después estas ecuaciones formaron la base para otras tareas en el proyecto como simulaciones HIL, la planificación del recorrido, y la optimización de la alimentación. La configuración del sistema modular permite a los usuarios cambiar rápidamente la configuración del rover y explorar los distintos enfoques en un período breve.
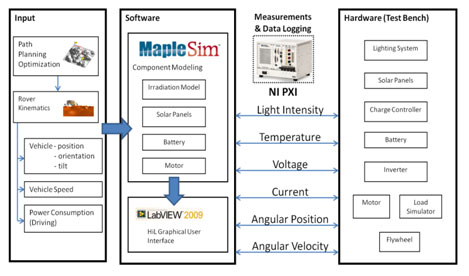
Fig. 2 Entorno hardware-in-the-loop
Entorno hardware-in-the-loop
La figura 2 muestra un resumen de la plataforma de prueba. La información respecto a la posición, orientación, inclinación, velocidad, y consumo del rover (obtenidos por los modelos dinámicos del rover) son usados como entradas en el modelo del software. Se desarrollo una librería de componentes del rover dentro de MapleSim y importada dentro de LabView Real-Time donde se desarrollaron el programa HIL y las GUI de las simulaciones. El programa se subió al ordenador incrustado en el National Instruments PXI donde se estableció la comunicación entre los componentes de hardware y los modelos software y se ejecutó la simulación en tiempo real.
“Debido a la naturaleza multidominio del sistema (mecánico, eléctrico y térmico), era deseable modelar todos sus componentes dentro de un entorno de modelado de manera que las relaciones criticas pudieran descubrirse fácilmente. Además, la eficiencia computacional es crucial en las simulaciones en tiempo real,” dijo el Dr. Khajepour. “MapleSim fue reconocido como el entorno ideal para esta aplicación gracias a sus habilidades multidominio, el uso de la simplificación simbólica para una mayor eficiencia computacional y la facilidad de conectividad a LabVIEW.”
Además de usar los componentes predeterminados de las librerías de MapleSim, se desarrollaron componentes personalizados. Un modelo para estimar la radiación solar que la superficie inclinada de Marte podría recibir fue implementado usando un bloque Custom Component de MapleSim. Este modelo tuvo en cuenta la posición del sol, la posición latitudinal y longitudinal del rover, así como la orientación e inclinación según se desplazaba del punto A al punto B. Esto fue usado conjuntamente con un modelo de un panel solar para estimar la generación de energía del rover durante el día.
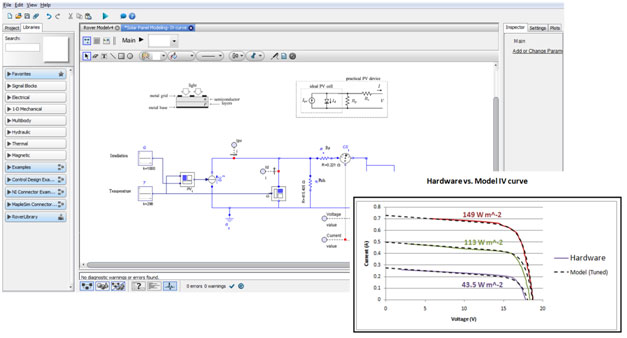
Fig. 3 Modelo del panel solar en MapleSim
“La naturaleza intuitiva de MapleSim permitió a mi equipo crear modelos de alta fidelidad en un periodo de tiempo corto,” dijo el Dr. Khajepour. “Esto jugo un papel clave en el éxito de esta plataforma modular de pruebas HIL que permitió la prueba de componentes, la estimación de niveles de energía, así como la validación de la administración de energía y los algoritmos de planificación de ruta.”
El equipo también utilizo MapleSim como una herramienta clave en una parte anterior del proyecto para desarrollar una solución completa al sistema de administración de energía de los rover autónomos. Ellos usaron MapleSim para desarrollar rápidamente modelos multidominio de alta fidelidad de los subsistemas del rover. La meta era desarrollar un algoritmo de planificación de ruta que tuviese en cuenta la demanda de energía del rover (y la generación). Usando los modelos desarrollados, el planificador de ruta encontró el camino óptimo entre el punto A y el punto B, de forma que el rover mantuvo los niveles más altos de capacidad de energía interna mientras evitaba obstáculos y secciones de terreno de alto riesgo.
El Dr. Khajepour y su equipo pudieron crear el modelo matemático del rover de 6 ruedas sin escribir una ecuación. “MapleSim fue capaz de generar automáticamente una serie de ecuaciones optimizadas para el sistema del rover, lo que fue esencial en la fase de optimización,” dijo él. El Dr. Khajepour se sorprendió con la interfaz grafica de MapleSim. “Dentro de MapleSim, puedes recrear simplemente el diagrama del sistema en tu pantalla usando componentes que representan el modelo físico. La habilidad de ver el modelo, ver las partes que se mueven, es muy importante para un desarrollador de modelos,” concluyo él.