Webinar: Modelado de dinámica multicuerpo

INTRODUCCIÓN
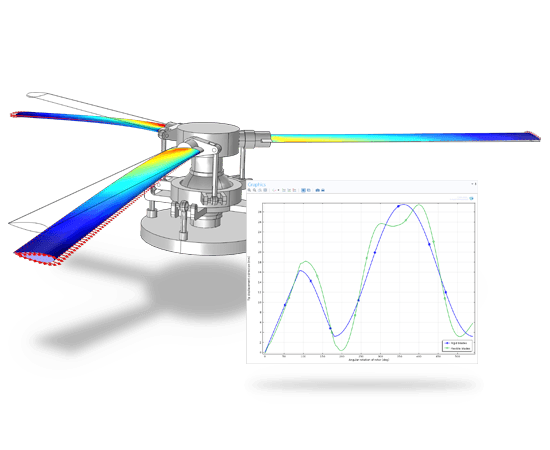 Imagen, cortesía de COMSOL, realizada usando COMSOL Multiphysics®
Imagen, cortesía de COMSOL, realizada usando COMSOL Multiphysics®El tratamiento sistemático del comportamiento dinámico de cuerpos interconectados, conocido como “dinámica multicuerpo”, ha originado un gran número de formalismos en el campo de la mecánica. El movimiento general de cuerpos (entendidos aquí como los constituyentes más simples de un sistema multicuerpo) ya fue tratado inicialmente por Newton (partículas puntuales) y Euler (cuerpos rígidos). En este último caso, Euler introdujo por primera vez el concepto de fuerzas de reacción entre los diferentes cuerpos. Posteriormente, se desarrollaron una serie de formalismos más avanzados basados en sistemas mínimos de coordenadas y ligaduras, como son las formulaciones de Lagrange y Hamilton.
Básicamente, el movimiento de los cuerpos se describe por su comportamiento cinemático. El comportamiento dinámico resulta del equilibrio de las fuerzas aplicadas y la variación temporal de momento, tanto lineal como angular. Hoy en día, el término “sistema multicuerpo” está relacionado con un gran número de campos de investigación en ingeniería, especialmente en robótica y dinámica de vehículos. Como característica importante, los formalismos de sistemas multicuerpo generalmente adoptan una forma algorítmica, lo que permite una implementación computacional que permite modelar, analizar, simular y optimizar el movimiento arbitrario de miles de cuerpos interconectados.
Podemos mencionar varios ejemplos de este tipo de sistemas. Un ejemplo básico es el modelado de un péndulo doble. Contiene una única articulación de bisagra simple en la que se pueden considerar diferentes condiciones, tales como restricciones, bloqueos, resortes, amortiguamiento, movimientos prescritos y fricción.
Otro ejemplo más elaborado de análisis multicuerpo es el modelado del plato oscilante de un helicóptero (swashplate). Se trata de un dispositivo que traduce la entrada del control de vuelo del helicóptero en el movimiento de las palas del rotor. Mientras las palas del rotor están girando, el plato oscilante transmite las órdenes del piloto desde el fuselaje no giratorio al eje rotativo y a las palas del rotor. En este caso, se suelen abordar dos niveles de modelado. En el primer nivel, se supone que todas las partes del mecanismo son rígidas, mientras que en el segundo nivel las palas del rotor se consideran flexibles mientras se mantiene rígido el resto de los componentes. La deformación en las palas del rotor se obtiene restando el movimiento de cuerpo rígido, obtenido en el primer caso, al movimiento obtenido en el segundo nivel de modelado. Este último caso incluiría tanto el movimiento del cuerpo rígido como la deformación.
En muchas ocasiones es necesario incluir otros fenómenos físicos en el análisis de un sistema multicuerpo. Un ejemplo paradigmático es el modelado de un motor de combustión. En este caso tendríamos una “simulación multifísica”, donde se combinan:
- Un análisis termodinámico de la mezcla de aire y combustible en un cilindro de motor.
- Un análisis de dinámica multicuerpo del conjunto motor.
OBJETIVO
El módulo Multibody Dynamics Module aporta un conjunto muy completo de características necesarias para la creación exitosa de simulaciones que contienen componentes rígidos y flexibles, e incluye acoplamientos físicos predefinidos para añadir fenómenos eléctricos, térmicos y estructurales a nuestros modelos.
En este webinar aprenderemos cómo sacar partido de las capacidades de COMSOL Multiphysics y de su módulo Multibody Dynamics Module para crear simulaciones con dinámica de multicuerpos. Este módulo incorpora el análisis por elementos finitos (FEA) al cálculo de modelos de mecánica estructural que contienen diferentes cuerpos unidos mediante diversas ligaduras, y es un módulo añadido que complementa al módulo más amplio de Mecánica Estructural (Structural Mechanics Module).
Descripción del evento
| Inicio | 21-11-2018, 9:00 (Europa\Madrid) |
| Clausura | 21-11-2018, 10:00 (Europa\Madrid) |
| Cierre inscripción | 21-11-2018, 9:30 (Europa\Madrid) |
| Disponibles | 86 |
| Lugar | Online |
Requisitos y configuración
El audio del seminario se ofrece por VoIP, por lo que será necesario que el equipo que utilice para participar en el seminario disponga de altavoces o auriculares.
Le recomendamos que compruebe la conectividad del equipo que utilizará para asistir al seminario, los reproductores multimedia y que lea el documento instrucciones y recomendaciones para los asistentes para su óptimo seguimiento. Si desea ahorrar tiempo en el acceso al webinar, configure el gestor de eventos antes del día de su realización.
Consulte los requisitos mínimos de sistema para participar en nuestros webinars.
Si no puede asistir...
Si no puede asistir y está interesado en este webinar, regístrese y le facilitaremos en un plazo de 24h a 72h un enlace para que pueda ver en diferido la grabación que realizaremos.