- Detalles
- Categoría: Maple
- Visto: 6136
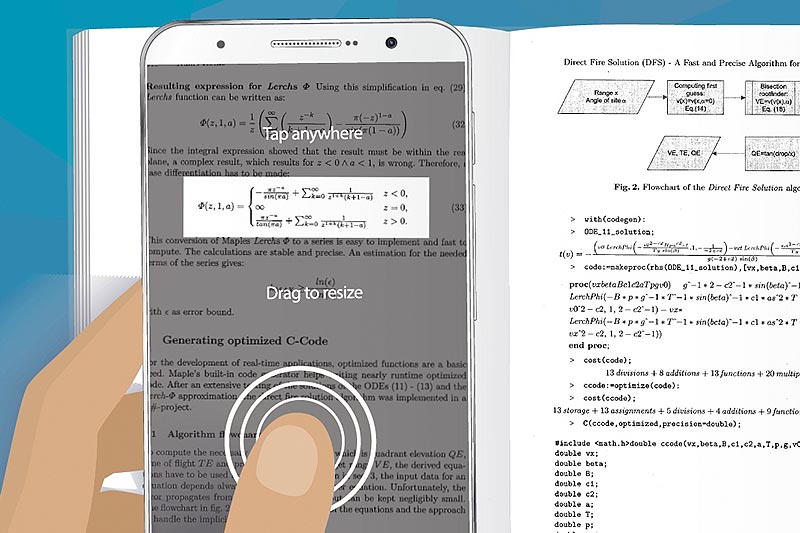
Maplesoft ™ ha anunciado el lanzamiento de Maple ™ Companion, una aplicación móvil gratuita que complementa el producto de software matemático Maple. La aplicación Maple Companion permite a los usuarios incorporar fácilmente expresiones matemáticas a Maple simplemente tomando una foto. Una vez en Maple, el usuario tiene todo el poder de Maple disponible para resolver, visualizar, analizar y explorar estas expresiones e incorporarlas a otros trabajos.
Los estudiantes pueden usar Maple Companion para verificar su tarea, visualizar un problema en el que están trabajando, explorar variaciones del problema y más, todo sin tener que ingresar las ecuaciones en Maple manualmente. Las expresiones pueden ser escritas a mano, como en las propias notas del alumno, o tipografía, como en un libro de texto. Cuando se usa junto con Maple, la aplicación Maple Companion permite a los usuarios:
- Evitar los errores que pueden ocurrir al transcribir expresiones matemáticas manualmente
- Ahorrar tiempo al introducir múltiples ecuaciones en Maple, como verificar la tarea o extraer información de un libro de referencia
- Capturar las matemáticas que necesitarán más tarde en Maple ahora, incluso si no tienen su ordenador a mano
Maplesoft ve la aplicación Maple Companion como un paso importante hacia el aprovechamiento de la tecnología de inteligencia artificial para ayudar a los estudiantes a mejorar su aprendizaje y comprensión de las matemáticas. Maplesoft está trabajando activamente con instructores y estudiantes para dar forma a la dirección futura de esta aplicación.
"Los estudiantes han confiado durante más de 30 años en la tecnología de Maplesoft para que les ayudara en sus cursos de matemáticas, y ahora, con Maple Companion, tienen otra herramienta para ayudarlos a tener éxito", dice Karishma Punwani, Directora de Satisfacción del Cliente en Maplesoft. "Con la potencia de Maple detrás, y los comentarios de nuestros clientes que informan para futuras versiones, Maple Companion ayudará a los estudiantes a aprender las matemáticas que son tan importantes en el mundo de hoy".
La aplicación gratuita Maple Companion está disponible en Apple App Store para iOS y en Google Play para usuarios de Android.
- Detalles
- Categoría: Comsol
- Visto: 5770
Esta edición especial de COMSOL News incluye historias sobre diseñadores, ingenieros e investigadores en áreas relacionadas con la generación, distribución y uso de la energía eléctrica.
Vea como los ingenieros de energías se benefician del uso del software de simulación COMSOL Multiphysics® para desarrollar transformadores de potencia, sistemas de cableado, líneas de transmisión, electrónica de potencia, y más. Además, lea sobre cómo la industria energética está expandiendo el uso de la simulación fuera de los departamentos de I+D e ingeniería mediante la construcción y distribución de aplicaciones de simulación especializadas.
Bájese la versión PDF de COMSOL News Special Edition Power aquí o haga clic en el enlace inferior para leer la versión digital directamente en su navegador.
Temas incluidos:
- Paquetes de potencia de alto rendimiento
- Equipos transformadores de potencia
- Cables subterráneos y de alta tecnología
- Sistemas de protección contra rayos
- Acoplamientos magnéticos para parques eólicos marinos
- Condensadores
- Líneas de transmisión de alto voltaje
- Aparellaje eléctrico aislados por gas (GIS)
- Fusión nuclear
- Interruptor automático de generador (GCB)
- Descarga de arco eléctrico
- HPC de dispositivos eléctricos de alta potencia
- Operación y mantenimiento de la red eléctrica
- Detalles
- Categoría: Signals Notebook
- Visto: 28752
Julio/Agosto 2019
Actualizaciones de usabilidad
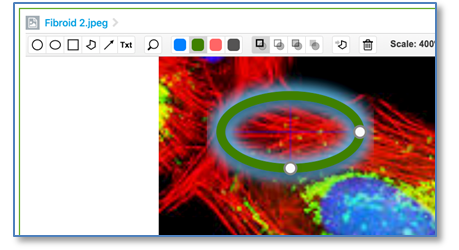
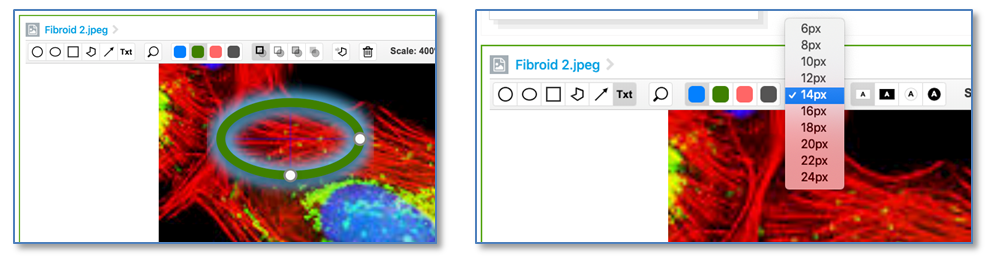
Se han agregado a Signals Notebook algunas mejoras a las capacidades de anotación de imágenes. Se ha agregado la forma elipse para indicar áreas de interés y se han ampliado los tamaños de fuente para el texto de anotación.
Actualizaciones de tablas
Esta novedad sólo está disponible para usuarios y administradores de Signals Notebook Standard o Private Cloud.
Ahora se pueden ordenar las tablas alfabéticamente o numéricamente. Las columnas que usan números con unidades se ordenan en relación con las unidades (por ejemplo, mg <g <kg). Cualquier nuevo orden de clasificación no se conserva y no se incluye en los cambios en el historial y se puede archivar en una tabla en modo de sólo lectura.
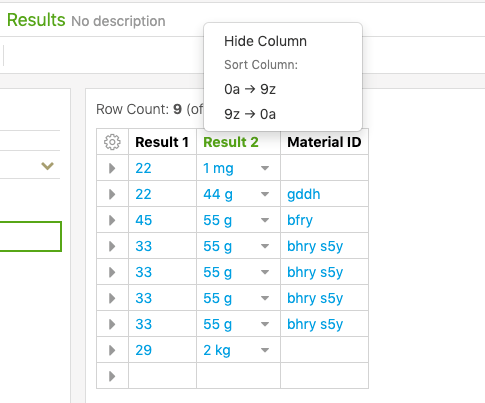
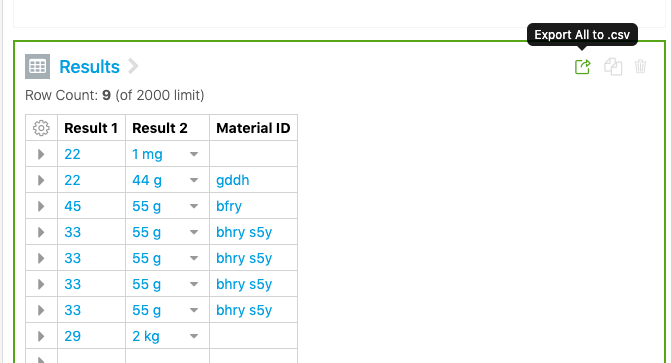
Los datos en las tablas también se pueden descargar como un archivo csv, incluidas todas las columnas mostradas.
Las tablas de materiales se han mejorado para que la adición de elementos secuenciales sea más eficiente y más coherente con otras tablas.
La capacidad de conectar tablas a fuentes de datos externas también se ha liberado por completo y ahora está disponible para todos los administradores.
Muestras
Esta novedad sólo está disponible para usuarios y administradores de Signals Notebook Standard o Private Cloud.
Una vez que el administrador ha activado la capacidad, ahora pueden agregar muestras a sus experimentos. Las muestras químicas se pueden crear a partir de reactivos o productos dentro de un experimento. También se pueden crear otros tipos de muestras con propiedades definidas por el administrador. Las muestras se almacenan en una tabla de muestras dentro de un experimento.
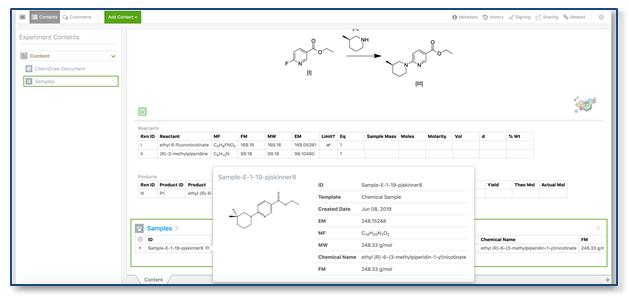
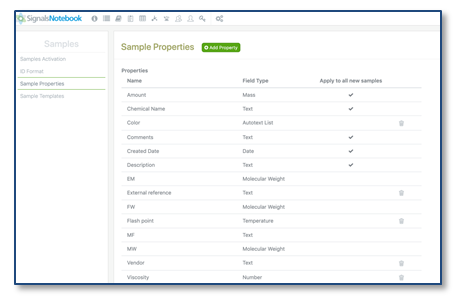
Los administradores pueden definir propiedades para aplicar a diferentes tipos de muestra. Los administradores también pueden definir el formato para la numeración de muestras.
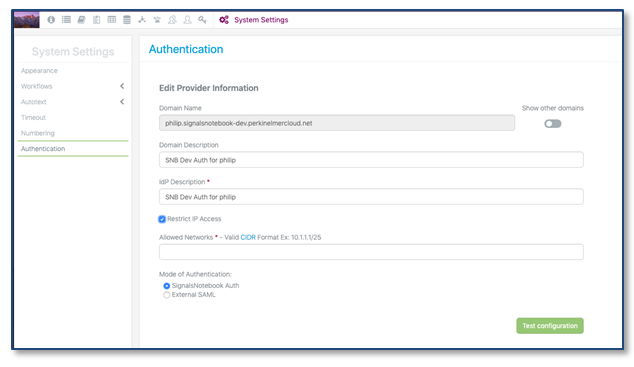
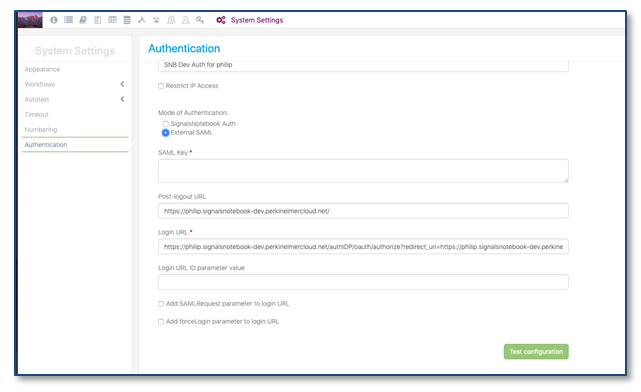
Rango de IP y restricción de SAML
Esta novedad sólo está disponible para usuarios y administradores de Signals Notebook Standard o Private Cloud.
Los administradores ahora pueden definir sus propios rangos de IP para restringir el acceso al inquilino. Los administradores también pueden configurar el uso de un proveedor de identidad compatible con SAML 2.0 para habilitar el inicio de sesión único.
- Detalles
- Categoría: Twinn Witness
- Visto: 5680

Nissan Motor Manufacturing UK ha estado desarrollando gemelos digitales predictivos para aumentar la eficiencia de la planta y optimizar su toma de decisiones comerciales durante varios años. Este artículo muestra 5 ejemplos de cómo, utilizando el software de simulación predictiva de Lanner, WITNESS Horizon, los ingenieros industriales han creado modelos para responder a preguntas operativas y estratégicas clave, y para ayudar a facilitar el viaje de Nissan a la Industria 4.0.
1. Cumplimiento de nuevos objetivos de producción del tren motriz
El desafío: identificar las mejoras de proceso requeridas que pueden duplicar las tasas de producción
Nissan se estaba preparando para lanzar un modelo actualizado de su automóvil eléctrico Leaf, con un motor nuevo y más avanzado. Para satisfacer la demanda proyectada del consumidor, la fábrica necesitaba duplicar su rendimiento del tren motriz, de 5 trabajos por hora a 10. El equipo de ingeniería industrial quería identificar posibles cuellos de botella con un diseño de producción actualizado, enfocando en las mejoras del proceso que serían necesarias para facilitar El aumento de la producción.
El resultado: la toma de decisiones basada en evidencia ayuda a alcanzar objetivos
Mediante la simulación predictiva, el equipo identificó un cuello de botella crucial en el proceso de sellado. Una vez que el sello se coloca en la unidad del motor, tiene que curarse durante 15 minutos antes de que pueda analizarse en busca de fugas. Incluso después de modelar varios escenarios de cambio, este bloqueo aún no se pudo eliminar.
Para superar el problema, los ingenieros utilizaron el modelo para experimentar con varias contramedidas. La solución fue implementar otro bucle que proporcione capacidad de almacenamiento adicional de la unidad de tren motriz. Esto aumentó el rendimiento al tiempo que proporcionó el tiempo de curado requerido antes de la prueba del sello.
Nissan ahora está utilizando este modelo para planificación adicional, ejecutando escenarios que facilitan 15 trabajos por hora para estar listos para una futura aceleración de la producción.
2. Comprender las tasas de fallo de la prueba de fugas
El desafío: eliminar el riesgo de producción durante la etapa de prueba de fugas del árbol de baterías
Otro elemento de planificación para el nuevo Leaf implicaba analizar el proceso de prueba de fugas para el árbol de baterías. El equipo quería saber la tasa de fallos de la prueba de fugas máxima permitida que aún permitiría alcanzar los objetivos de rendimiento.
El resultado: el conocimiento preciso ayudó a satisfacer la demanda y cumplir con los KPI
El gemelo digital predictivo se utilizó para modelar escenarios de producción con tasas de falla de prueba de fugas variables. Concluyó que la tasa de falla no podía exceder el 5.2% sin afectar el rendimiento. Esto ha permitido que los equipos de ingeniería planifiquen efectivamente para satisfacer la demanda.
3. Lograr un proceso de mecanizado de culatas más rentable
El desafío: minimizar los requisitos de paletas sin afectar el rendimiento
Como parte de la fabricación de vehículos, las culatas se someten a un proceso de mecanizado, limpieza y luego segunda etapa de mecanizado. Durante parte de este tiempo, la cabeza está unida a una paleta. Los ingenieros de Nissan estaban planeando ordenar paletas nuevas, pero con un coste significativo para cada una, se preguntaron si la instalación podría operar con un número reducido sin afectar negativamente las tasas de rendimiento actuales.
La solución: ahorro de 25.000€ en la adquisición de palets
El gemelo digital de la línea de mecanizado de culatas se utilizó para ejecutar diversos escenarios para diferentes volúmenes de paletas, analizando factores como entradas, cadencia (takt time) y volúmenes. El modelo mostró que se requeriría un stock mínimo viable de 70 palets para operar a plena capacidad y con poco riesgo de cuellos de botella, significativamente menos que los 100 anticipados. Los beneficios equivalen a un ahorro general de aproximadamente unos 25.000€.
4. Reducción de cuellos de botella en la instalación de pintura de parachoques
El desafío: determinar el escenario de almacenamiento óptimo
La instalación de pintura de parachoques de la planta de Sunderland recibe componentes de 2 líneas de producción, logrando procesar piezas para múltiples modelos de automóviles y la amplia gama de colores de pintura. Los cuellos de botella comenzaban a ocurrir porque la instalación se estaba quedando sin espacio en el estante de almacenamiento. Ingeniería quería saber cuántos bastidores se requerían para evitar tener que detener la línea de pintura.
El resultado: una planificación efectiva a largo plazo que mantenga el rendimiento
Utilizando un gemelo digital de la línea de pintura de parachoques, desarrollado con el software WITNESS Horizon, Nissan creó un modelo visual conectado a datos de producción de hojas de cálculo. El gemelo digital predictivo ejecutó varios escenarios basados en los diferentes modelos de automóviles que llegaron al taller de pintura y determinó el número óptimo de bastidores de almacenamiento para garantizar que ninguna de las líneas de producción corriera el riesgo de detenerse. El departamento de planificación ahora ha desarrollado el gemelo digital para dar cuenta de los nuevos planes de lanzamiento de vehículos para que los requisitos puedan optimizarse de manera continua.
5. Análisis del caso de inversión para la expansión
El desafío: determinar si la instalación necesitaba invertir en una nueva estación de película de protección de pintura
La película protectora de pintura se aplica a ciertos paneles de automóviles según el destino y la aplicación, para proteger el acabado y aumentar la durabilidad. En preparación para el lanzamiento del nuevo modelo Infiniti, el equipo de ingeniería de chasis y acabado estaba preocupado de que pudiera requerirse una nueva estación de película de protección de pintura para satisfacer la demanda planificada.
El resultado: ahorros de 28.000 € en gastos de capital
Se usó un gemelo digital predictivo para simular el cronograma de control de producción. El equipo realizó escenarios para los requisitos de la película de protección de pintura y determinó que las instalaciones existentes tenían la capacidad suficiente para hacer frente al aumento proyectado de la demanda. Una solución para hacer frente al uso del equipo existente significaba que los gastos de capital en una nueva estación, que habrían requerido una inversión de 28.000 €, se evitaban con confianza.
“Somos un departamento bastante ajustado y trabajar con Lanner y WITNESS nos ha ayudado a desarrollar modelos que ahora se usan regularmente para tomar decisiones comerciales en Nissan en el Reino Unido. Gracias al modelado, hemos podido implementar mejoras constantes en nuestros procesos, y la simulación se ha convertido en una parte clave de la adopción por parte de Nissan de IoT industrial y tecnología inteligente. ”- Martin Perkins, ingeniero industrial, Nissan Motor Manufacturing UK
- Detalles
- Categoría: Minitab
- Visto: 18083

¿Cuántas muestras son necesarias para estar "el 95% seguro que al menos el 95% - o incluso el 99% - del producto es bueno?
La respuesta depende del tipo de variable de respuesta que se está utilizando, categórica o continua. El tipo de respuesta dictará cuando utilizar:
- Muestreo de atributo: Determina el tamaño de la muestra para una respuesta categórica que clasifica cada unidad como Buena o Mala (o quizás, en_especificación o fuera_de_especificación)
- Muestreo de variable: Determina el tamaño de la muestra para una medida continua que sigue una distribución Normal.
El método de muestreo de atributo es válido sin importar la distribución subyacente de los datos. El método de muestreo de variable tiene una suposición estricta de normalidad, que requiere menos muestras.
Nos focalizaremos en el método de atributos.
Muestreo de atributo
Una sencilla fórmula proporcoina el tamaño de la muestra requerida para hacer una sentencia del 95% de confianza sobre la probabilidad de que un ítem este en_especificación cuando la muestra de tamaño n tiene cero defectos.
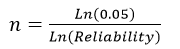 , donde reliability es la probabilidad de un ítem en-especificación.
, donde reliability es la probabilidad de un ítem en-especificación.
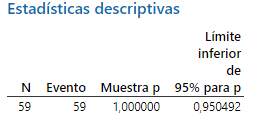
Para una reliability de 0.95 o 95%, 
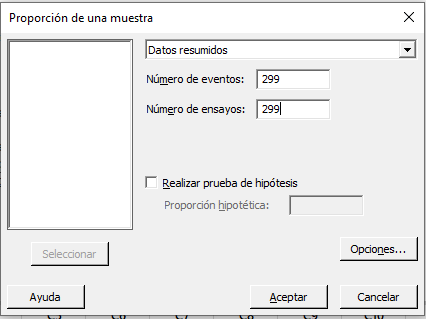
Para una reliability de 0.99 o 99%, 
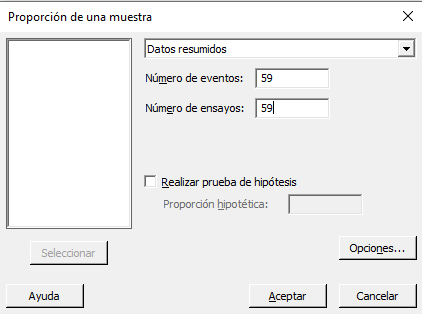
Por supuesto, si no se quiere realizar el cálculo manualmente, se puede utilizar el cuadro de diálogo de Minitab en Estadísticas > Estadísticas básicas > 1 Proporción para ver los niveles de fiabilidad para diferentes tamañoñs de muestra.
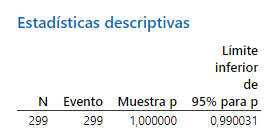
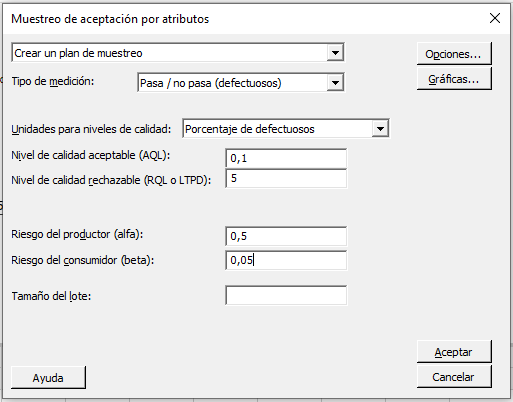
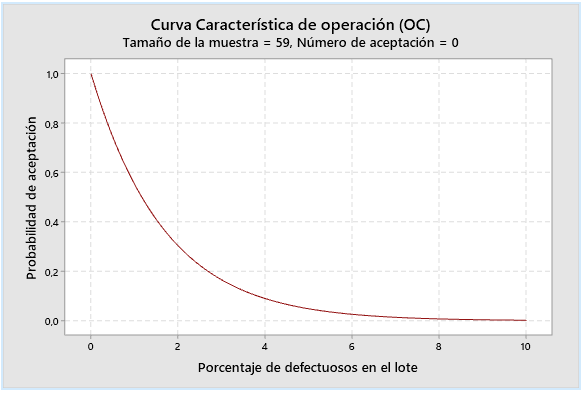
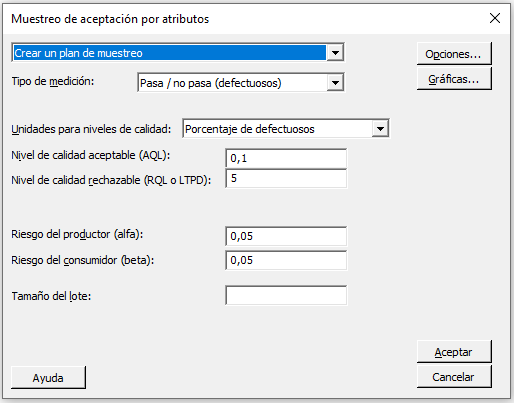
Estos dos planes de muestreo son realmente solo planes de muestreo de aceptación C=0 con un tamaño de lote infinito. Los mismo tamaños de muestra pueden generarse utilizando Estadísticas > Herramientas de calidad > Muestreo de aceptación por atributos por:
- Poniendo RQL a 5% para una fiabilidad del 95% o 1% para una fiabilidad del 99%.
- Poniendo el Riesgo del consumidor (β) a 0,05, lo que resulta en un nivel de confianza del 95%.
- Poniendo AQL a un nivel arbitrario menor que RQL, como 0,1%.
- Poniendo el Riesgo del productor (α) a un valor arbitrario alto, como 0,5 (nótese que α debe ser menor que 1-β para que funcione).
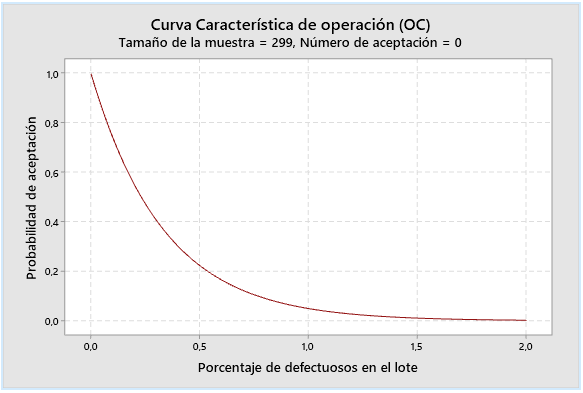
Cambiando RQL a 1%, puede obtenerse el siguiente plan C=0:
Si se quiere realizar las mismas sentencias de confianza mientras se permite tener 1 o más defectos en la muestra, el tamaño de la muestra requerirá ser más grande. Por ejemplo, permitir 1 defecto en la muestra requerirá un tamaño de muestra de 93 para la sentencia de fiabilidad del 95%. Este es un plan de muestreo C=1. Puede generarse, en este caso, disminuyendo el Riesgo del productor a 0,05.
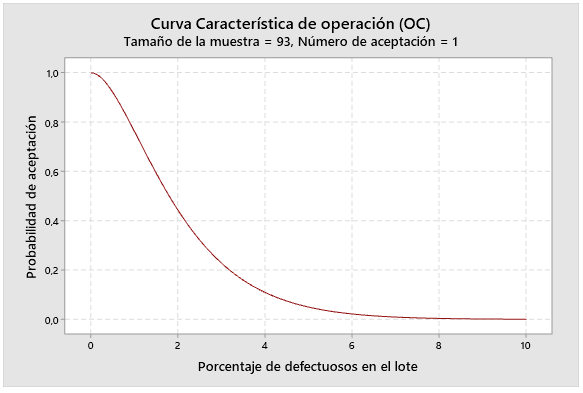
Puede verse que el tamaño de la muestra para una aceptación de 0 es mucho menor - en este caso, subir el número de aceptación de 0 a 1 ha incrementado el tamaño de la muestra de 59 a 93.
- Detalles
- Categoría: NAG
- Visto: 6108
Les informamos que la última versión de NAG Library ya está disponible. Mark 27 trae mucha nuevas funcionalidades que incluyen la programación cónica de segundo orden, optimización sin derivadas, factorización de matrices no negativas y el método activo de primer orden, adiciones de correlaciones cercanas y más versiones adjuntas de los resolvedores NAG.
Entre las nuevas características a destacar cabe nombrar la nueva funcionalidad SOCP (Second-order Cone Programming). Este nuevo resolvedor está basado en el método del punto interior. Se ha convertido en una importante herramienta en muchos campos, que van desde la ingeniería a la teoría de control y las finanzas cuantitativas, debido al amplio rango de aplicaciones y problemas convexos que puede resolver, como problemas cuadráticos cuadráticamente restringidos (QCQP), programación lineal robusta y muchos otros.
- Detalles
- Categoría: MapleSim
- Visto: 6217
DesafíoUn fabricante líder de máquinas de moldeo por inyección estaba desarrollando un nuevo diseño que prometía ofrecer un rendimiento fiable a un nuevo precio, más bajo que nunca. Sin embargo, el nuevo diseño tenía que cumplir requisitos estrictos para el dimensionado del motor y requería un controlador especializado que garantizara la misma fiabilidad que esperan sus clientes. SoluciónPara garantizar motores dimensionados con precisión y un diseño de controlador preciso, la compañía utilizó MapleSim y B&R Automation Studio para obtener un feedback basado en un modelo durante su proceso de diseño. Utilizando una técnica llamada puesta en servicio virtual, la compañía podría usar un modelo preciso y basado en la física de su nuevo diseño para comprender la dinámica de su nueva máquina y tomar decisiones informadas para el dimensionamiento del motor y el diseño de control. ResultadoAl utilizar los resultados de la puesta en servicio virtual, la empresa pudo identificar los requisitos de carga precisos para sus nuevos motores y su perfil de movimiento, eliminando los costes adicionales de los motores sobredimensionados. Además, la estrategia de control de la máquina se probó exhaustivamente contra el modelo dinámico, evitando los riesgos de dañar la máquina real durante la prueba. Con la ayuda de MapleSim y B&R Automation Studio, la nueva máquina podría ofrecerse a un precio más bajo que antes, a la vez que ofrece el mismo alto nivel de fiabilidad requerido en la industria del moldeo por inyección. |
La industria del moldeo por inyección es un mercado diverso y competitivo donde los productos innovadores deben cumplir los requisitos más exigentes. Para muchas empresas, estos requisitos se prestan a enfoques conservadores para los nuevos productos y a una estrategia de prueba sólida para minimizar las fallas operativas. Todas estas prácticas pueden resultar en un tiempo de comercialización más lento y mayores costos de desarrollo. Para seguir siendo competitivas, estas compañías están adoptando nuevas técnicas basadas en modelos que informan sobre las elecciones de diseño con más precisión que nunca.
Una empresa líder en moldeo por inyección desarrolló recientemente una nueva máquina que podría cumplir con los estrictos requisitos de rendimiento con motores más pequeños y rentables. El nuevo diseño ahorraría dinero con motores más pequeños, pero impuso nuevos requisitos de controlador para evitar daños costosos en la máquina. Para lograr este nuevo diseño sin excesos en costes ni tiempos, la compañía utilizó una estrategia de diseño basada en modelos llamada puesta en servicio virtual. Con esta estrategia, se podría usar un modelo basado en la física del nuevo diseño para informar sobre los requisitos precisos para el dimensionamiento del motor, y también podría servir como una plataforma de prueba efectiva para los nuevos y complejos controladores.
Sin su propia experiencia en la puesta en servicio virtual, la compañía recurrió a los servicios de software y desarrollo de Maplesoft y B&R. Usando MapleSim, la herramienta de modelado y simulación de Maplesoft, se desarrolló un modelo dinámico de la máquina. Con los servicios de B&R, se creó el modelo, que proporcionó la base virtual para la estrategia de dimensionamiento y control del motor de la máquina.
Dimensionamiento de motores rentable para un nuevo perfil de movimiento
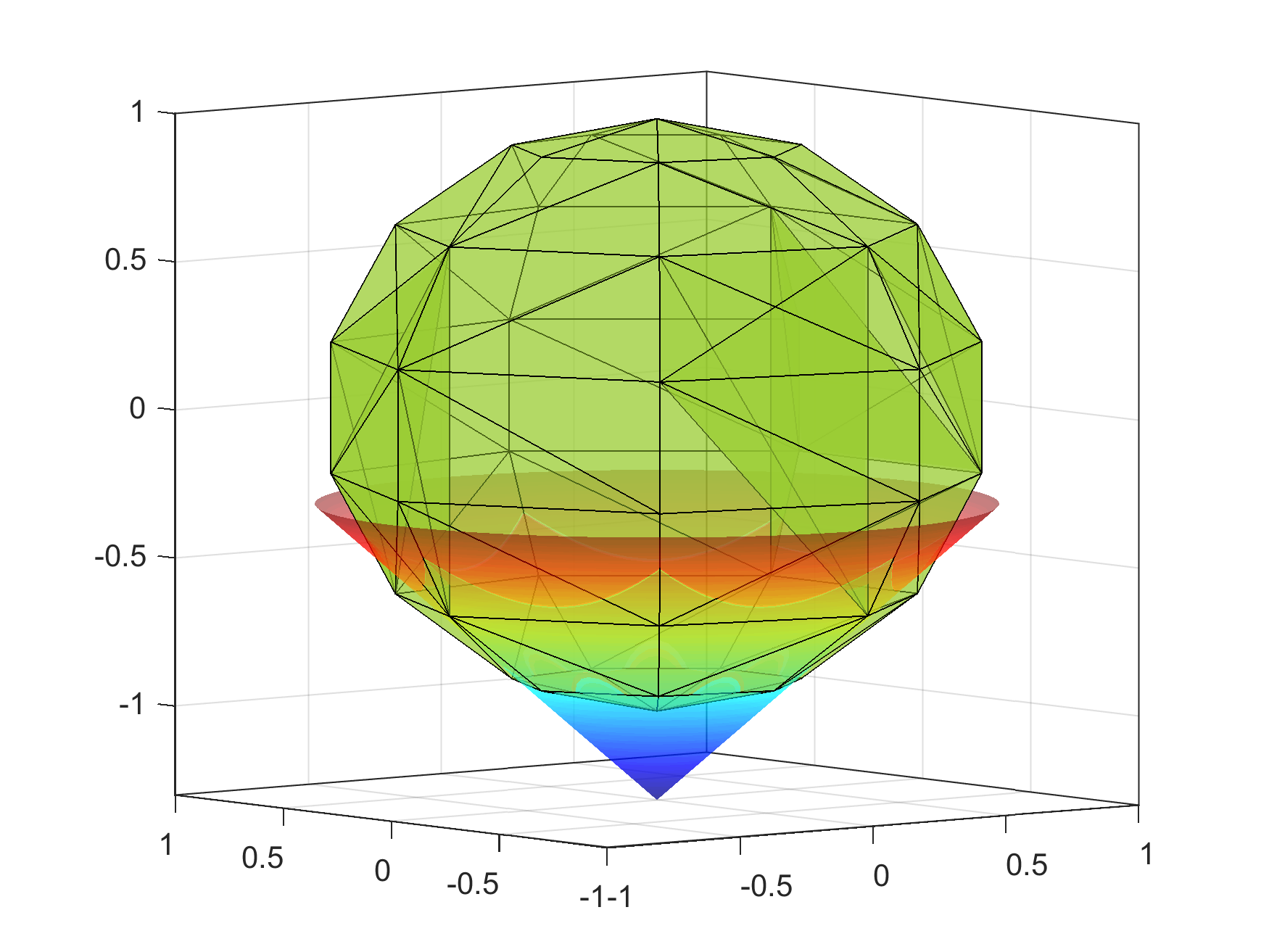
Usando MapleSim, se creó un modelo basado en la física del nuevo diseño (Figura 1). La compañía proporcionó a B&R los detalles de su nuevo mecanismo, incluidas las geometrías, las especificaciones del material y el perfil de movimiento propuesto de la máquina. Con esta información, el modelo MapleSim fue creado para probar los requisitos de carga de los motores. Al importar la información CAD existente de la compañía a MapleSim, el modelo se configuró y personalizó en cuestión de días, lo que permitió que el dimensionamiento del motor comenzara antes de lo que los procesos tradicionales de la compañía hubieran permitido.
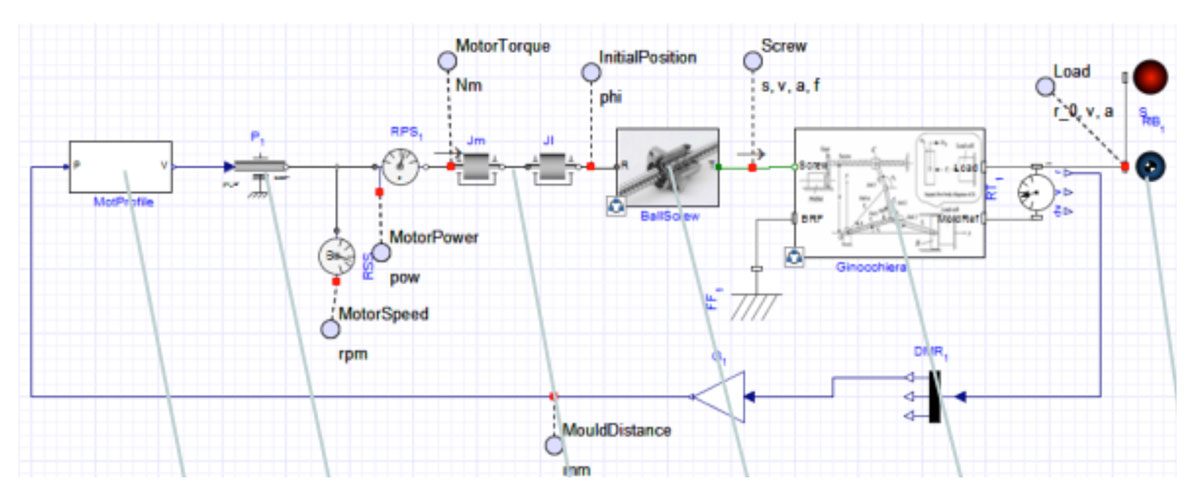
Figura 1: El modelo MapleSim del nuevo mecanismo de cierre del molde incluía geometrías del mecanismo, especificaciones del motor y otros detalles para garantizar una simulación realista.
Para garantizar la precisión del modelo MapleSim, el cliente proporcionó datos de su perfil de movimiento anterior para este mecanismo. Al demostrar los mismos requisitos de carga para el perfil de movimiento tradicional, se demostró que el modelo tenía un alto grado de realismo, lo que le dio a la compañía confianza para avanzar y explorar su nuevo perfil de movimiento propuesto para este mecanismo.
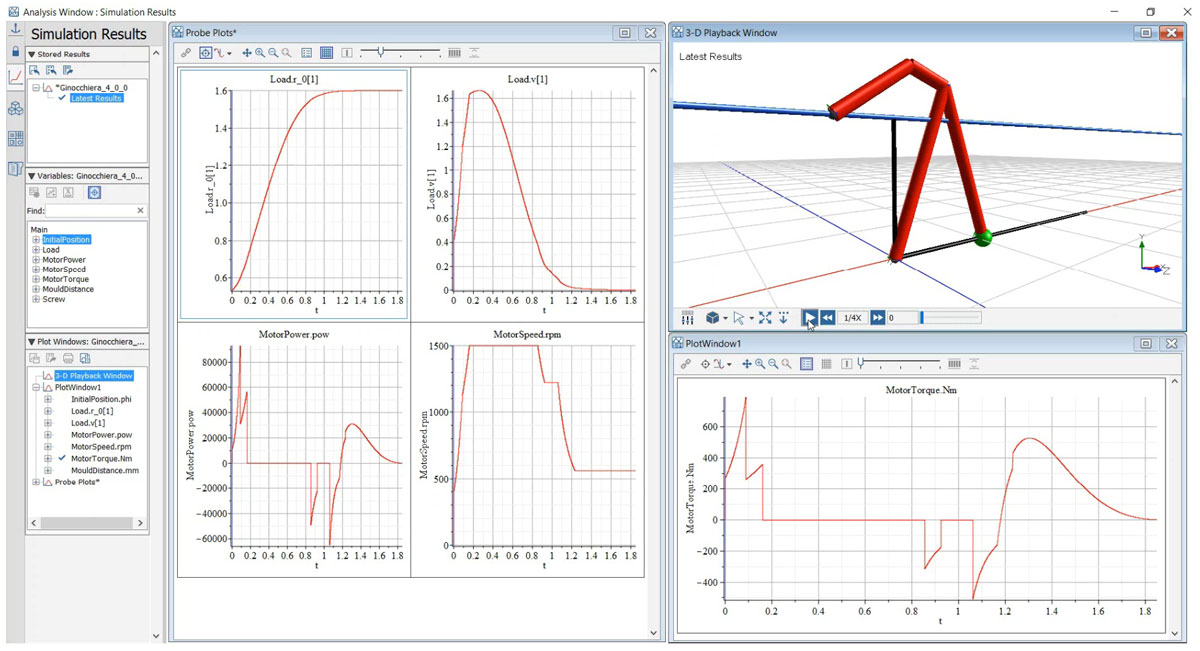
Figura 2: Los resultados de la simulación en MapleSim pudieron mostrar los requisitos del motor dado el perfil de movimiento propuesto, además de una ventana de visualización tridimensional para una inspección visual rápida.
El nuevo perfil de movimiento se implementó en MapleSim, y los resultados se pueden ver en la Figura 2 . Los resultados de la simulación muestran automáticamente una visualización en 3D para una verificación rápida del diseño, y los requisitos de carga del motor posteriores se muestran junto con la visualización. Estos resultados se formularon en un gráfico común Speed-Torque (Figura 3). En este gráfico, se ve que el ciclo de trabajo de la máquina (verde) está dentro de los requisitos de motor de la compañía (azul). Esta información aseguró a la compañía que, en cada punto del perfil de movimiento propuesto por la máquina, el motor estaría operando dentro de límites seguros, y que el motor en sí mismo estaba dimensionado sin un margen de error innecesariamente grande.
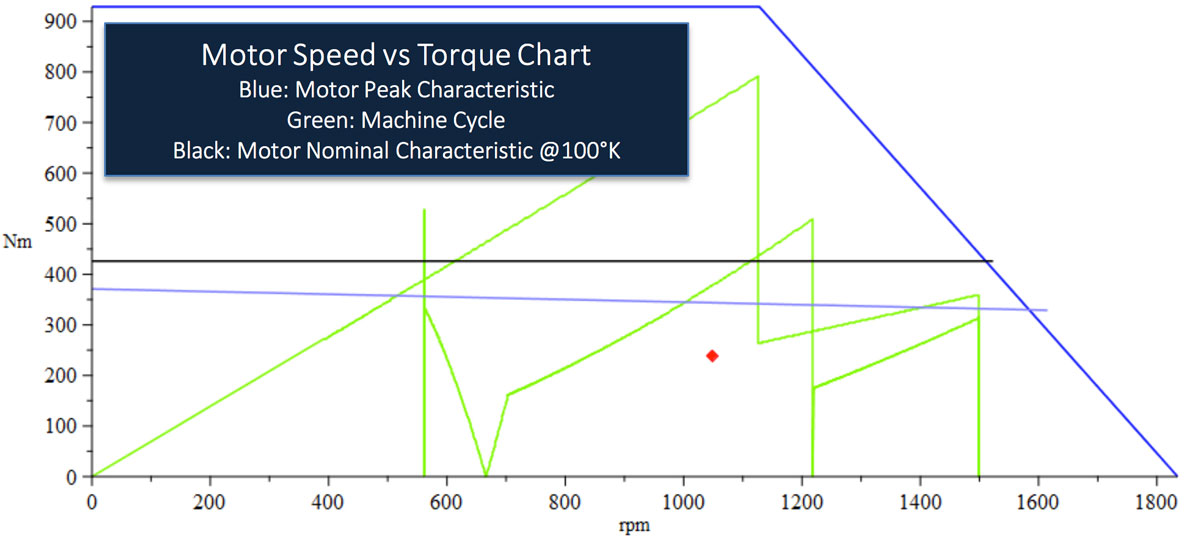
Figura 3: El gráfico Speed-Torque, como se ve aquí, demostró que el par motor requerido (verde) permanecería dentro de las características operativas del motor especificado (azul) durante todo el ciclo de trabajo de la máquina.
Prueba de estrategia de control
La nueva máquina dividiría las cargas del motor por la mitad mediante el uso de un mecanismo de cierre de doble eje, lo que ayudaría a reducir los costos de un solo motor más grande. Un requisito clave en este nuevo diseño es que ambos ejes permanecen en paralelo durante la apertura y el cierre del molde. Si cualquiera de los ejes se desalinea, la máquina corre el riesgo de sufrir daños significativos. Para evitar este daño, la estrategia de control debe garantizar la alineación del eje en una variedad de condiciones. Para reducir los riesgos de daños a la máquina, se utilizaron técnicas de puesta en servicio virtual para probar el rendimiento del controlador contra el modelo basado en la física que se creó anteriormente.
Para preparar el modelo MapleSim para la puesta en servicio virtual, se perfeccionó para reflejar el nuevo diseño de doble eje ( Figura 4 ). El nuevo mecanismo fue duplicado y conectado a un subsistema de molde, que modeló el molde como un sistema de amortiguación de resorte. Este subsistema proporcionó la cantidad de fuerza requerida sobre el mecanismo a medida que procedía a cerrar el molde y experimentar el empuje del material de moldeo por inyección.
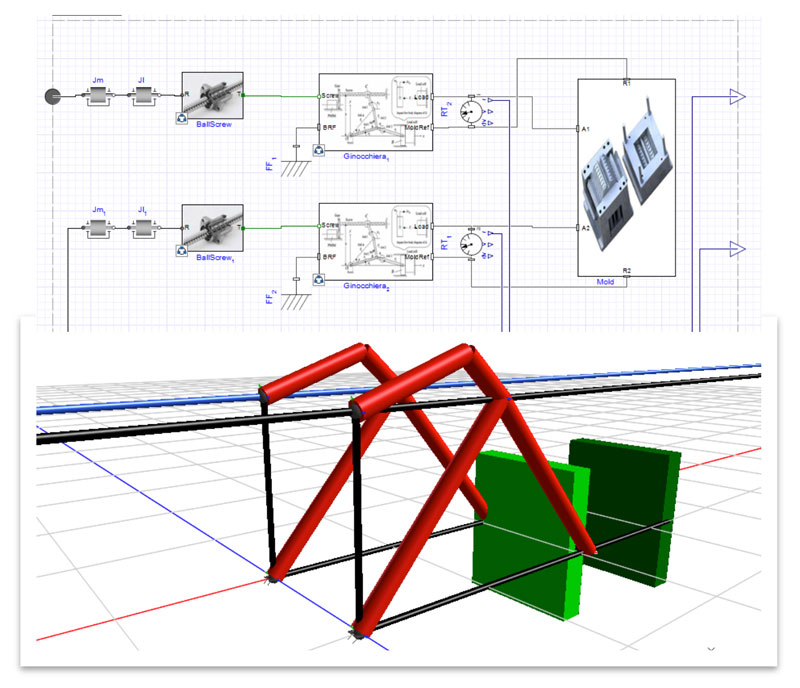
Figura 4: Al duplicar el mecanismo en MapleSim, el nuevo mecanismo de cierre se modeló en preparación para el diseño del control en B&R Automation Studio.
El modelo MapleSim se exportó luego como una Unidad de maqueta funcional (FMU), que actúa como un modelo ejecutable independiente que se puede utilizar en una variedad de otras herramientas de diseño ( Figura 5 ). La FMU se importó a B&R Automation Studio, donde funciona como una variedad de entradas (pares de motor) y salidas (datos del sensor) que pueden ejecutarse en tiempo real para pruebas de control.
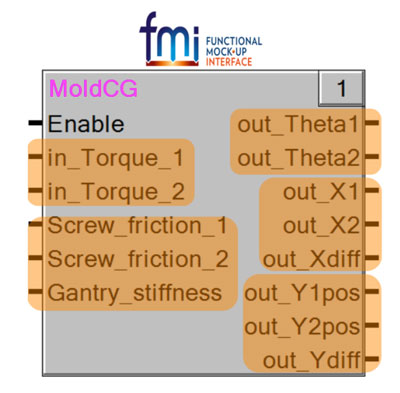
Figura 5: La Unidad de Mock-Up de funciones (FMU) actúa un conjunto de entradas y salidas que pueden ser utilizadas por el software de automatización para el diseño de control y las pruebas en tiempo real.
Una vez en B&R Automation Studio, se probó la precisión del nuevo modelo y controlador para garantizar que pudieran proporcionar resultados significativos para los objetivos de la empresa. En las semanas posteriores a la prueba del perfil de movimiento, la compañía creó un prototipo físico de su nuevo mecanismo de doble eje. Si bien este prototipo podría proporcionarles información de prueba, la información clave, la robustez del controlador para mantener la alineación del eje, impondría un daño significativo en la máquina, lo que hace que las pruebas repetidas sean una opción extremadamente costosa en un prototipo físico. Al usar un modelo virtual, estos riesgos pueden evitarse.
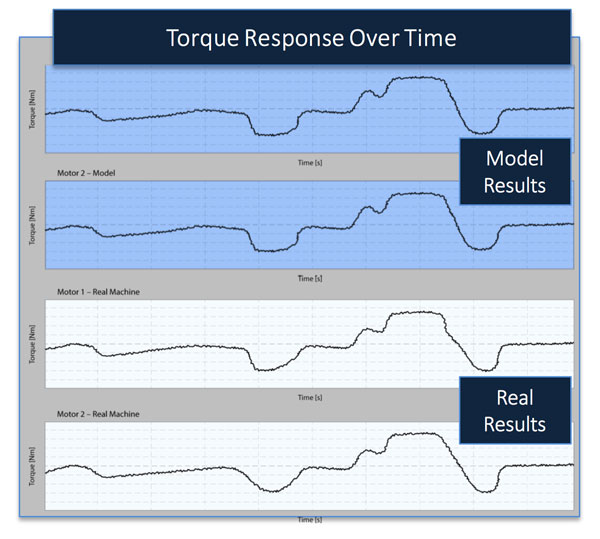
Figura 6: El modelo MapleSim, al importarlo a B&R Automation Studio, demostró un realismo muy preciso en comparación con un prototipo físico.
Los resultados de las pruebas de realismo se pueden ver en la Figura 6 , que muestra un ajuste muy estrecho entre el rendimiento del modelo y el rendimiento del prototipo físico. Esta precisión le dio confianza al cliente para proceder con las pruebas de solidez del controlador. Al insertar un bloque de fricción personalizable en solo uno de los ejes, el modelo podría ajustarse para simular una variedad de condiciones que darían lugar a una desalineación. La prueba del controlador se realizó utilizando una variedad de valores de fricción, y se demostró que el impacto del controlador en la alineación del eje fue exitoso para alinear el eje después de que se introdujeron las fricciones ( Figura 7) Al probar el controlador con el modelo virtual, se pueden ejecutar innumerables simulaciones en una fracción del tiempo que de otro modo tomaría con una máquina física, ahorrando tiempo y dinero para garantizar una máquina robusta y confiable.
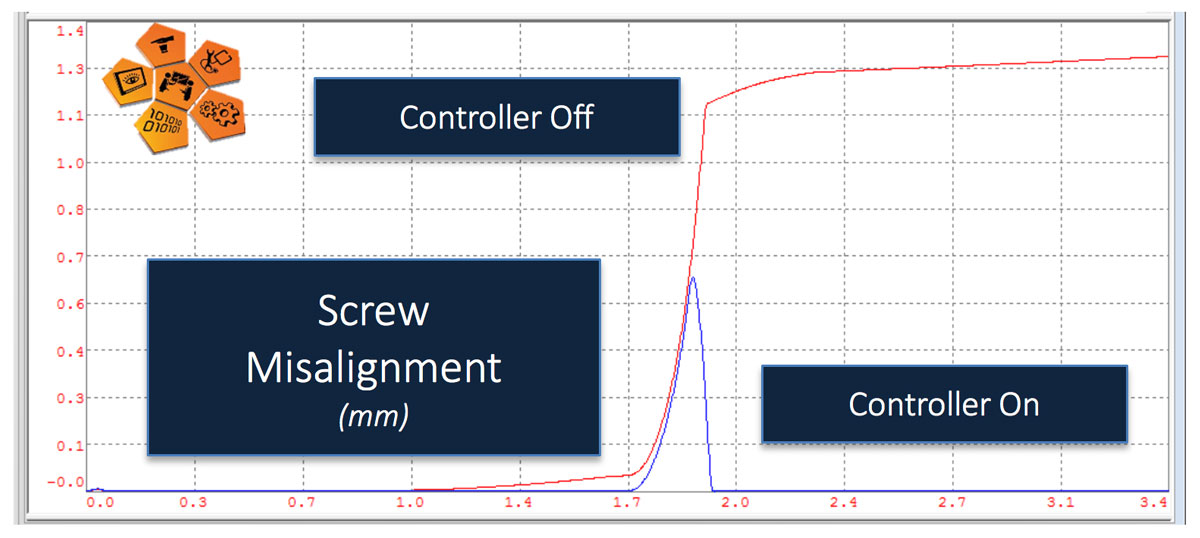
Figura 7: Los resultados de las pruebas del controlador mostraron que un factor ambiental, como fricciones desiguales en los ejes, podría ser rápidamente explicado por el controlador.
Conclusión
La puesta en servicio virtual puede ayudar a las empresas a explorar, probar y validar nuevos diseños, todo mientras reduce el tiempo y el dinero gastados en el desarrollo de productos. En este caso, la compañía pudo crear una máquina de moldeo por inyección de bajo costo utilizando un nuevo diseño de doble eje con motores más pequeños y económicos. Mediante el uso de MapleSim, se simularon los requisitos de carga precisos de los motores, asegurando que la compañía haya seleccionado el motor adecuado para el trabajo. Para evitar los costos y las demoras de los prototipos perjudiciales para las pruebas del controlador, pudieron garantizar la robustez del controlador mediante la puesta en servicio virtual. En conjunto, estas técnicas le han dado a esta compañía un nuevo y poderoso conjunto de herramientas de diseño, ayudándoles a continuar un paso adelante en un mercado ya competitivo.