- Detalles
- Categoría: Minitab
- Visto: 6750

Minitab constantemente analiza las necesidades del mercado en busca de maximizar las inversiones de los usuarios en sus soluciones. Además de recibir información de los usuarios, el 30 de abril de 2021 sacaron una nueva versión de Quality Trainer para todos sus nuevos clientes. Esta nueva versión se llama The Minitab Education Hub y los clientes de Quality Trainer recibirán acceso libre simultáneamente junto con la renovación de Quality Trainer en 2022.
¿Qué es Minitab Education Hub?
Minitab Education Hub es una plataforma basada en la web flexible y fácil de usar que permite la formación y entrenamiento analítico. Minitab Education Hub alberga Quality Trainer, cursos de formación estadística propietarios de Minitab y proporciona itinerarios de aprendizaje personalizados (ver diagrama inferior) junto con recursos educacionales complementarios como vídeos y documentación técnica.
Experiencia de usuario personalizada y detallada
|
Minitab Education Hub permite a los usuarios seguir su dedicación y progreso a través de informes y tableros detallados. Los administradores obtienen percepción del rendimiento global del programa y su utilización. Los usuarios pueden tomar itinerarios de aprendizaje específicos, una serie de cursos relacionados diseñados para dirigir sus temas o áreas de interés específicos. Se emiten certificados de conclusión por cada itinerario de aprendizaje y dispone de capacidades flexibles de evaluación, incluyendo información instantánea sobre cuestionarios. |
|

¿Cuál es el beneficio para los clientes?
Minitab Education Hub contiene el nuevo itinerario de Aprendizaje de Análisis Predictivo que trata temas como Analítica Predictiva y Regresión Múltiple, así como artículos técnicos de casos de estudio que se han añadido al contenido original. Con esta nueva versión se ha facilitado nuevo material de forma más eficiente. El usuario encontrará que la navegación en el Education Hub le permite un acceso más racional a los temas específicos. Como Administrador se podrá evaluar de forma más eficiente el progreso de los usuarios, así como poder hacer crecer a los usuarios a través de temas más avanzados, distribuyendo itinerarios de aprendizaje individuales frente a la suite completa de contenidos.
Soporte multilingüe
El contenido de Minitab Education Hub (actividades de aprendizaje en línea) actualmente está disponible en inglés, español, francés, portugués, chino simplificado y japonés. Se está concluyendo la versión en alemán que estará disponible a final de año. Con la nueva versión existen 36 idiomas adicionales para la interfaz de usuario.
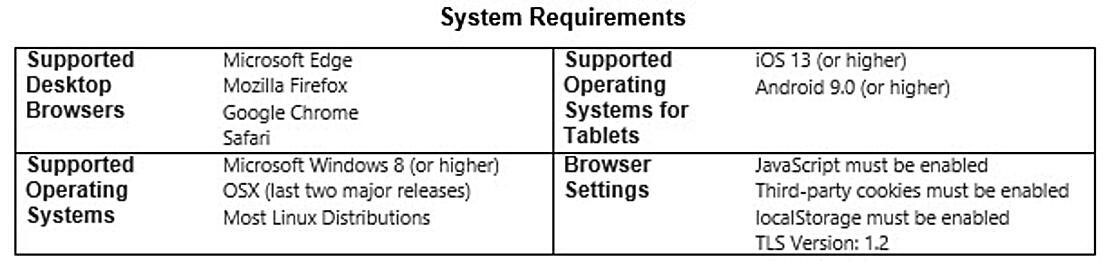
Una solución flexible basada en la web
Minitab Education Hub es una plataforma basada en la web flexible y fácil de usar que soporta múltiples navegadores, sistemas operativos, y ajustes de navegación. Con los sistemas operativos móviles soportados, los usuarios pueden aprender en cualquier momento y en cualquier sitio.
Importación de usuarios
Importar usuarios es tan fácil como exportar los nombres y correos electrónicos de los usuarios desde Quality Trainer e importarlo dentro del The Minitab Education Hub. El equipo de apoyo al cliente de Minitab ha preparado guías y plantillas de importación a través del Portal de soporte técnico.
Acceso a Minitab Education Hub
En el momento que se programe la renovación anual de Quality Trainer, los usuarios recibirán un email de activación desde Minitab con instrucciones para acceder y crear una clave de entrada. Una vez recibido el email, por favor marque como favorito el sitio www.minitabeducationhub.com. El Administrador de la Licencia tendrá acceso a una guía de administración de la licencia que le proporcionará instrucciones sobre cómo asignar las licencias de la empresa directamente en The Minitab Education Hub.
Nota importante: Esta actualización correrá en paralelo con la suscripción de Quality Trainer únicamente durante el próximo ciclo de renovación. Al final de este ciclo, la suscripción de Quality Trainer será discontinuada y la suscripción al Minitab Education Hub continuará en su lugar.
- Detalles
- Categoría: Comsol
- Visto: 4541
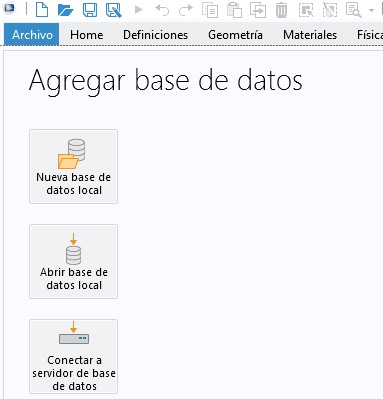
Ahora los usuarios de COMSOL puede ver el Administrador de Modelos en acción y conocer las funcionalidades de gestión de modelos que aporta, gracias a un video tutorial que se encuentra en la zona de aprendizaje (Learning Center) de COMSOL.
Con el Administrador de Modelos, en lugar de guardar y almacenar múltiples versiones de un modelo en archivos de modelos separados, puede usarse Model Manager de COMSOL Multiphysics®. Este espacio de trabajo permite almacenar y organizar de manera eficiente los archivos del modelo, así como los archivos relevantes para el mismo, incluyendo archivos CAD, datos experimentales y múltiples versiones de cualquier dato de entrada utilizado en un modelo.
- Detalles
- Categoría: Minitab
- Visto: 5343
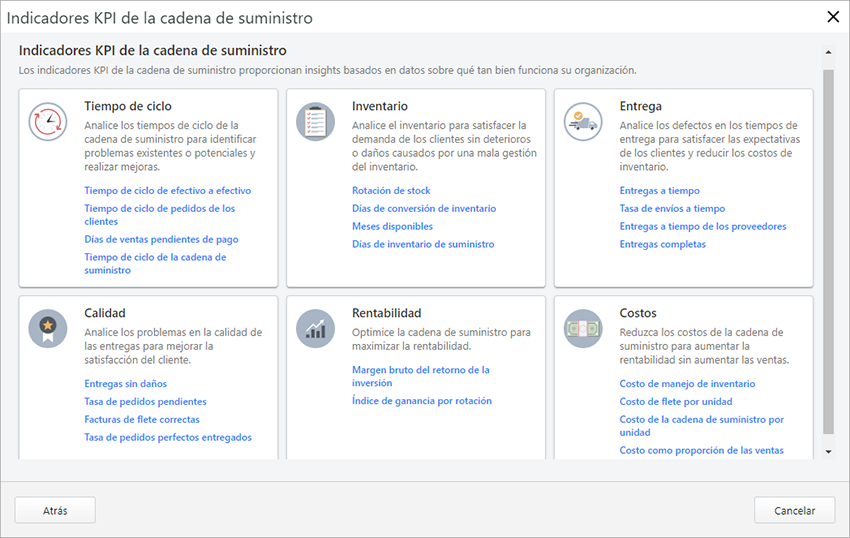
Minitab Statistical Software ha incorporado recientemente nuevos módulos de alto nivel opcionales que ayudarán a los usuarios a aplicar análisis estadísticos complejos en sus procesos diarios, sin la necesidad de conocer en profundidad la teoría estadística de cada procedimiento.
En particular, existen módulos para aplicar todo la potencia del análisis de datos de Minitab Statistical Software para enfrentar los desafíos en las cadenas de suministro, en los centros de atención al cliente, y en los centros de salud.
Estos módulos introducen la terminología profesional de los diferentes campos, y analizan los indicadores clave de cada problemática (KPI) para permitir tener una información fidedigna del rendimiento del servicio en cuestión, y poder aplicar fácilmente métodos de optimización en su organización.
Un cuarto módulo opcional de Minitab Statistical Software añade algoritmos de análisis predictivos a los ya presentes en el producto base. El módulo de analítica predictiva permite aumentar la potencia analítico de Minitab con los mejores algoritmos de aprendizaje automático, los más precisos de su clase, que brindan conocimientos más profundos sobre los datos.
- Detalles
- Categoría: Minitab
- Visto: 6293

Con sede en Tokio, Takeda Pharmaceutical Company Ltd. es una empresa biofarmacéutica global centrada en el paciente, basada en valores e impulsada por I+D que tiene el firme compromiso de ofrecer "una mejor salud y un futuro más brillante" a las personas en todo el mundo. Su pasión y su búsqueda de tratamientos que puedan cambiar la vida de los pacientes están profundamente arraigadas en más de 230 años de un prestigioso historial en Japón.
Philippe Noquéro, Master Black Belt (MBB) certificado y Líder de Six Sigma en Europa, es responsable de las iniciativas de Six Sigma en toda la red de Takeda en Europa como parte del programa general AGILE 4.0 que ha implementado la organización.
Takeda ha mantenido una larga relación con Minitab y ha utilizado el análisis para resolver problemas de manufactura, identificar y ejecutar oportunidades de mejora y diseñar experimentos adecuados para lograr mejoras en los procesos con una supervisión mínima, entre otras cosas.
El desafío
En Suiza, Takeda Neuchâtel produce tres medicamentos que tratan dos tipos de trastornos o deficiencias de la coagulación:
- Trastorno sanguíneo de tipo 1: Hemofilia A – estos pacientes sufren de una falta o deficiencia de la proteína VIII. La hemofilia A es la forma más común y mejor conocida de los trastornos y deficiencias de la coagulación. Takeda produce estos dos medicamentos coagulantes para este trastorno:
- Factor VIII: Es la proteína necesaria para la cadena de coagulación de la sangre
- Factor VIII de larga duración: Se trata de una versión de acción prolongada del Factor VIII en el organismo del paciente
- Trastorno sanguíneo de tipo 2: La enfermedad de Von Willebrand (VWD) – este trastorno sanguíneo no permite que la sangre se coagule correctamente. Las personas con VWD tienen un nivel bajo de la proteína del factor de von Willebrand o la proteína no funciona como debería. Takeda produce un medicamento coagulante para este trastorno:
- Factor de von Willebrand: La proteína necesaria para la cadena de coagulación de la sangre
Los tres fármacos también se denominan "tratamiento recombinante", lo que significa que se producen sin añadir derivados humanos o animales. Los medicamentos se obtienen mediante producción biotecnológica, utilizando el cultivo de células. Como tales, los productos farmacéuticos ofrecen un grado extremadamente alto de seguridad, pureza y eficacia.
Takeda quería producir más de estos fármacos de forma más eficiente, por lo que se propuso encontrar una forma de aumentar el rendimiento de los cultivos celulares utilizados durante el proceso de producción. Para lograrlo, los investigadores necesitaban saber qué parámetros del proceso afectan al rendimiento de los cultivos celulares.
La solución
El equipo de Philippe dio seguimiento a múltiples lotes y recopiló datos sobre casi 30 parámetros del proceso que pueden afectar al rendimiento del cultivo celular de la proteína esencial para la coagulación de la sangre. Philippe utilizó muchas herramientas estadísticas durante su análisis exploratorio, incluyendo técnicas de ingeniería de características para preparar los datos para el análisis. El equipo descubrió que podían utilizar el método de mínimos cuadrados parciales (PLS) para identificar los factores críticos que afectan el rendimiento. La regresión de mínimos cuadrados parciales describe la relación entre muchos predictores y una o más respuestas continuas. Resulta especialmente útil cuando los predictores son muy colineales o cuando hay más predictores que observaciones.
Utilizando este método, el equipo identificó algunos parámetros clave del proceso, visibles en la visualización de los coeficientes estandarizados, que indican la importancia de cada predictor en el modelo.
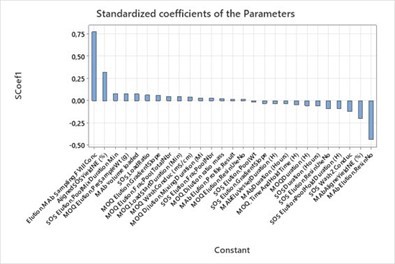
Philippe sabía que tendría que compartir estos resultados con otros miembros del equipo y con colegas de otras áreas. Dado que la regresión de mínimos cuadrados parciales es una técnica relativamente avanzada, puede ser difícil que todos los interesados puedan entenderla y utilizarla por sí solos. Los científicos e ingenieros de Takeda están capacitados y entrenados para analizar los datos por sí solos utilizando Minitab Statistical Software. Philippe decidió evaluar cómo un árbol de decisión CART podía complementar el análisis de regresión de mínimos cuadrados parciales. Este enfoque ofreció dos ventajas: Los árboles CART permitieron confirmar los resultados del análisis PLS y, en general, son más fáciles de usar y de entender.
Un resultado beneficioso que se obtiene de un árbol CART es una gráfica que indica la importancia relativa de las variables. La variable con la mayor puntuación de mejora se establece como la más importante, y las demás variables se clasifican según corresponda. Los resultados coincidieron con el enfoque de mínimos cuadrados parciales y generaron interesantes debates sobre el rendimiento de los cultivos. CART también proporciona el árbol de decisión individual, otra visualización intuitiva (no se muestra).

Los resultados
Utilizando múltiples modelos de aprendizaje de máquina, los investigadores aprendieron más sobre el rendimiento de los cultivos celulares y pudieron identificar los parámetros críticos. Los resultados del árbol de decisión CART se alinearon con los de la regresión de mínimos cuadrados parciales. Los árboles de decisión CART pueden ser utilizados por más científicos e ingenieros porque, en general, son más fáciles de usar e interpretar. Esto ayuda a acelerar la comprensión de los resultados, así como su interpretación por parte de los usuarios de Minitab en Takeda. Aunque son nuevos en comparación con las técnicas tradicionales de modelado, son intuitivos y sirven para complementar las herramientas estadísticas que los ingenieros y científicos ya conocen.
Como paso siguiente, Philippe y su equipo planean incorporar árboles de decisión avanzados, como las técnicas de modelado Random Forests y TreeNet® (árboles con potenciación de gradiente), utilizando Minitab Statistical Software con el fin de mejorar la precisión del modelo.
|
CLIENTE LA ORGANIZACIÓN
EL RETO PRODUCTOS UTILIZADOS RESULTADOS
|
- Detalles
- Categoría: Comsol
- Visto: 5210
La versión del software COMSOL® 6.0 update 2 contiene mejoras de rendimiento y estabilidad para COMSOL Multiphysics®, COMSOL Server™, y COMSOL Client. Esta actualización también incluye mejoras significativas y actualizaciones para el servidor Model Manager, que incluyen una nueva herramienta de gestión de activos con una interfaz web.
La actualización se aplica sobre la versión de COMSOL 6.0 (Build: 6.0.0.312, 6.0.0.318, o 6.0.0.354). La actualización es acumulativa (eso significa, que incluye las mejoras de rendimiento y estabilidad de las versiones 6.0 update 0 y update 1) y puede ser aplicada directamente en una instalación de la versión 6.0, 6.0 update 0, o 6.0 update 1.
Si dispone de una versión anterior a la versión 6.0 y una licencia válida que esté en suscripción de mantenimiento, entonces realice una instalación completa de la versión 6.0 desde la página de descarga del producto, que ya incluirá todas las actualizaciones.
Todos los productos de software de COMSOL® experimentan mejoras de estabilidad introducidas como actualizaciones. La siguiente lista contiene las mjoras más importantes en la versión COMSOL® 6.0 update 2 (incluyendo las de la update 0 y update 1).
COMSOL Multiphysics®
- Se ha corregido una vulnerabilidad de seguridad potencial actualizando Apache Log4j a la versión 2.17.1. Ver el artículo de la base de conocimiento aquí.0
- Se reasignó la tabla de colores Gaia para utilizar una distribución de colores logarítmica (en lugar de lineal).1
- Se solucionó un problema de refresco en la búsqueda de resultados que surgía cuando múltiples instancias de COMSOL Multiphysics® se conectaban y guardaban en la misma base de datos local.1
- Se ha añadio soporte para triple clic con el mouse en celdas de tabla editables para selecionar todo el contenido (Windows®).1
- La información de progreso ahora aparece al guardar modelos en una base de datos de Model Manager.1
- Guardar desde la ventana de Recuperación de archivos para modelos utiliznado un add-in ahora funciona como se esperaba.1
- Solucionado un problema donde los ajustes del orden residual manual para la adaptación de la malla podían funcionar inadecuadamente para soluciones con varias componentes de campo.1
- Se ha reducido el número de archivos de recuparación para grandes barridos paramétricos en algunos casos.1
- Solucionada la carga de viejos modelos con conmutadores de material.1
- Se han añadido src2dst_mph y dst2src_mph al Constructor de físicas. Son versiones multifísicas especiales de src2dst y dst2src definidas por pares de contacto.1
- Solucionado un problema que hacía fallar algunas veces la reconexión de una app desde otro ordenador.1
- Mejora del rendimiento para la versión Apple silicon (M1) de COMSOL Multiphysics®.2
- Mejora del rendimiento para circint(), ballint() y operadores similares.2
- Búsqueda arreglada en librerías de materiales internas y definidas por el usuario, que ahora ignora los espacios en blanco. Por ejemplo, al buscar BSL7 se encontrará tanto Ohara S-BSL 7 Glass como Ohara BSL7Y Glass en la librería de materiales ópticos.2
- Solucionado un problema donde los mensajes de información sobre las herramientas de la cinta para algunos acoplamientos multifísicos habían perdido información en la ventana de Ayuda.2
- Corregido el mapeado de selecciones en mallas importadas transformadas.2
- Resultados de medidas geométricas corregidos en componentes donde existen mallas que definen su propio modelo geométrico.2
- Solucioinado un problema que a veces causaba que el objeto geométrico erróneo se midiera al mezclar mallas y geometrías importadas en el mismo componente.2
- Funcionalidad mejorada al combinar geometría y malla que definen sus propios modelos geométricos en el mismo componente.2
- Posicionamiento mejorado de puntos de nodo que ahora es más robusto para caras curvadas definidas por una malla lineal.2
- Solucionado un problema donde modelos de orden reducido fallaban para contar de forma apropiada las dependencias directas del operador de evaluación y salidas no lineales en frecuencia o tiempo si la expresión definida no era freq o t, respectivamente.2
- Solucionado el zoom por defecto para seleccionar el comportamiento para informar de imágenes de selección de forma que no puedan ser sebrescritas al escoger una vista bloqueada para los ajustes de Vista.2
- Solucionadas las propiedades de numeración de un archivo de plantilla de Microsoft® Word® especificada por el usuario de forma que ahora son utilizadas al generar informes en un formato de Microsoft® Word®.2
- Solucionado un error inesperado que podía ocurrir al generar informes desde plantillas.2
- Solucionado un error en el conjunto de datos FFT Spatial que causaba un cuelgue.2
- Solucionado un problema donde las funciones de interpolación definidas por una tabla de resultados podían dar a veces el valor erróneo al evaluarlo después de abrir un archivo, pero después de calcular o actulaizar la solución.2
- Añadida una opción para utilizar las AMD® Optimizing CPU Libraries (AOCL), que ahora están disponibles además de las opciones disponibles previamente para utilizar las Intel® Math Kernel Library (MKL) y las standard BLAS library para procesadores AMD® con arquitectura ZEN. Para utilizar AOCL, arrancar COMSOL® con la opción de línea de comando -blas aocl.2
- Mejoras de estabilidad.2
- Mejoras de rendimiento.1
- Mejoras de seguridad.1
Model Manager
- Ahora puede bajarse automáticamente y abrirse una base de datos de demostración utilizando la acción Download Demo Database for Model Manager en el menú Ayuda.2
- En el sistema operativo Windows® este menú está disponible como submenú en el menú Archivo.
- La feature de la licencia MODELMANAGER ahora se incluye al prestar la licencia de COMSOL Multiphysics®.2
- COMSOL Multiphysics® ahora proporciona una notificación cuando el camino de una nueva base de dato local de Model Manager parace estar en un disco en la nube, lo que ahora no está soportado. Ver la entrada de la Base de Conocimiento Nº 1295 para más información.2
- Formatos adicionales soportados al importar archivos CAD almacenados en una base de datos del Model Manager en una geometría: Parasolid®, ACIS® (SAT), STEP, IGES, y AutoCAD® (DXF™/DWG™).2
Model Manager Server
- COMSOL Multiphysics® ahora puede conectarse a un servidor de Model Manager con licencias fijadas a una CPU (CPU) y licencias de usuario único (NSL) además de licencias en red flotante (FNL).2
- El servidor de Model Manager ahora incluye un sistema de gestión de activos basado en la web que los usuarios de COMSOL Multiphysics® pueden utilizar para enlazer modelos y resultados de simulación a varios documentos, presentaciones, notas de proyecto, diapositivas, y otros archivos suplementarios y metadata. Utilizar el sistema de gestión de activos también es una forma sencilla de compartir estos archivos y metadata con gente de la organización que pueda no tener acceso a COMSOL Multiphysics® — todo mientras se mantiene todo en la misma base de datos que almacena los modelos.2
- Ahora se soporta directamente seguridad de capa de transporte (HTTPS), autentificación externa con AD/LDAP, y autentificación basada en proxy inversa con la interfaz web de administración de sistema servidor del Model Manager.2
- Ahora es posible configurar la gestión de usuario y control de acceso para una base de datos de servidor desde la interfaz web de administración de base de datos de servidor de Model Manager.2
- Solucionada una vulnerabilidad de seguridad potencial al actualizar Apache Log4j a la versión 2.17.1. Ver artículo en la Base de conocimiento aquí.0
- Se ha asegurado que los servidores Apache Solr administrados solo escuchen en la interfaz localhost en Linux® y macOS.1
- Mejoras de estabilidad.0,1
- Mejoras de seguridad.1
COMSOL Compiler™
- Solucionado un problema de licenciamiento con aplicaciones compiladas en la versión 6.0. Ver artículo de la base de conocimiento aquí.0
Application Builder
- Solucionada una pérdida de memoria en la Aplicación de Prueba.1
- Solucionado un problema la precisión del formato de números para objetos de formulario de visualización de datos utilizados en add-ins.1
- Solucionado un problema al utilizar TLS para la conexión del servidor SMTP al enviar emails.2
AC/DC Module
- Mejora de rendimiento: mejora significativa al evaluar parámetros de la bobina en estudios de Perturbación en el dominio de la frecuencia.1
- Un nuevo complemento Extractor de circuito está disponible bajo el módulo AC/DC en la ventana de librerías Add-in para generar circuitos eléctricos desde físicas resueltas.2
Acoustics Module
- Solucionado un problema en las condiciones de Puerto y Puerto concentrado en la interfaz de Acústica de presión cuando se utilizan las condiciones juntas con simetrías (la condición Simetría). Los casos donde el puerto se utiliza junto con simetrías ahora se manejan correctamente cuando la configuración es significativa.2
CAD Import Module
- Soporte para importar archivos de SOLIDWORKS® 2022.1
CFD Module
- Definiciones de variables fijas en condiciones de par de continuidad de flujo.1
- Solucionado un problema donde cualquier modelo creado en la versión 6.0 que utiliza un medio poroso con un modelo de turbulencia k-epsilon activado o cualquier otro modelo de turbulencia basado en RANS de ecuación de transporte podría haber producido resultados incorrectos. Con esta actualización, ya no es posible utilizar esta combinación de físicas, y únicamente los modelos de turbulencia algebraica (Algebraic yPlus y L-VEL) están soportados en combinación con un medio poroso. Hay planeado para una versión futura una implementación de modelos de turbulencia basados en RANS de ecuación de transporte en medios porosos.2
Chemical Reaction Engineering Module
- El subnodo de Dispersión ahora está disponible en los nodos Catalizador poroso y Cama empacada.1
- Ahora aparece un error cuando la capacidad térmica (Cp), utilizada en acoplamiento multifísicos de Flujo reactivo, es cero.2
Heat Transfer Module
- Se ha añadido una advertencia para informar que los acoplamiento multifísicos Flujo de humedad y Flujo reactivo no soportan el modelo de turbulencia LES.1
- Las funcionalidades Fuente de calor, Valores iniciales y Fuera de plano, ahora son aplicables en Medios Porosos utilizando tipos con desequilibrio térmico local y cama empacada. Las características Flujo de calor, Conector de sistema concentrado, superficie a ambiente, fuente de calor de contorno, y Potencia de haz depositado, ahora son aplicables en contornos adyacentes de Medios porosos utilizando tipos de medio poroso de desequilibrio térmico local o cama empacada. Cuando estas características se aplican en dominios de desequilibrio térmico local, camas empacadas o en contornos adyacentes, la temperatura efectiva se utiliza en las ecuaciones de la funcionalidad. Para aplicar la temperatura del fluido o sólido de los medios porosos en su lugar, utilizar la subfuncionalidad de los nodos Fluido, Matriz porosa o Pellets.1
- Solucionado un problema con la temperatura inicial para el Conector de Sistema Térmico Concentrado.1
- Corregida la contribución de la Fuente de Calor de Contorno Par cuando la fuente de calor se define desde una funcionalidad entrada.1
- Solucionada la opción de correlación elástica Mikik en la funcionalidad Contacto Térmico Par.1
- Solucionados algunos problemas al definir el factor de volumen y superficie en cáscaras debido a la curvatura o modelado con axisimetría 2D.1
- Solucionao un problema con el almacenamiento del factor de vista en Radiación superficie a superficie para evitar recálculos innecesarios.2
- Habilitada la funcionalidad de Capas finas en pares.2
- Corregida la velocidad de Solido para casos donde la Malla móvil y la Geometría deformada se combinan.2
- El acoplamiento Pipe Connection, que requiere una licencia para el módulo Pipe Flow Module, ahora puede ser utilizado para un acoplamiento con flujo de fluido utilizando una licencia para el módulo Heat Transfer Module.2
LiveLink™ for Simulink®
- Solucionado un problema para el trazado de partículas utilizado en una cosimulación cuando se utiliza un método de modelo para correr continuamente una secuencia de resolvedor sin una actualización del modelo.2
Microfluidics Module
- Añadido un valor inicial perdido para la Temperatura en la interfaz Slip Flow.1
Optimization Module
- Solucionado un problema con el escalado semianisotrópico en las funcionalidades de transformación para optimización de forma.2
Porous Media Flow Module
- Solucionado un problema con el acoplamiento de poroelasticidad al abrir modelos creados con versiones anteriores a 6.0.1.
- La ecuación para medios porosos no saturados cuando se utilizan los modelos de almacenamiento desde densidad y porosidad fueron modificados, lo que elimina el error de variable indefinida para la variable almacenamiento.1
Ray Optics Module
- Solucionado un error donde la acumulación de dominio en óptica de rayos daba un resultado erróneo para el primer elemento de malla alcanzado por un rayo saliendo de un dominio sin mallar.2
RF Module
- Mejorada la adaptación de malla en subconjuntos de dominios, en particular para modelos con capas perfectamente adaptadas, mediante la exclusión de contribuciones residuales de dominios en los que la adaptación no es realizada. Consecuentemente, el estimador del error en esos dominios será cero.1
Subsurface Flow Module
- Solucionado un problema con el acoplamiento de poroelasticidad cuando se abren modelos creados con versiones anteriores a la 6.0.1.
- Mejorada la visualización de la ecuación para la Ley de Darcy incluyendo fuerzas gravitacionales.1
0 Nuevo en update 0 (23 diciembrec 2021)
1 Nuevo en update 1 (11 febrero 2022)
2 Nuevo en update 2 (26 abril 2022)
- Detalles
- Categoría: Minitab
- Visto: 2781
La COMPETITIVIDAD de las empresas está vinculada a la detección de OPORTUNIDADES DE NEGOCIO.
Estas oportunidades se pueden generar buscando reducir la VARIABILIDAD de sus procesos.
El reto
 La empresa de fundición Fagor Ederlan tuvo un reto hace 10 años en relación con la fabricación de calipers para proveedores de grupos de freno.
La empresa de fundición Fagor Ederlan tuvo un reto hace 10 años en relación con la fabricación de calipers para proveedores de grupos de freno.
Los clientes contemplaban añadir nuevos requerimientos a los estándares basados en geometría, estructura metalúrgica y comportamiento mecánicos. Eran nuevos requerimientos basados en tolerancias para las frecuencias de vibración de las piezas y la variabilidad se estimaba, en un principio, excesiva. El desconocimiento técnico del tema conllevaba un riesgo de pérdida de competitividad, ya que los clientes anunciaban la obligación de incorporar inspección 100% en proceso en 5 años.
El reto se abordó como un Proyecto Seis Sigma bajo la supervisión de la Dra. Lourdes Pozueta, formadora y coach principal en la metodología Seis Sigma en la Organización y con la participación de un equipo multidisciplinar de Calidad, Procesos, Ingeniería y Centro Tecnológico.
La Dra. Lourdes Pozueta, implicada en primera persona en el caso, desgrana en los siguientes vídeos el proceso que llevó a cabo y qué herramientas de Minitab forjaron sus "gafas especiales" para VER y entender el proceso y tomar decisiones sobre el diseño de soluciones para reducir la variabilidad.
Fase de descripción
En esta fase el objetivo es explicar el comportamiento de variables de interés a partir de información básica existente y detectar patrones que ayuden a orientar una recogida de datos más detallada. Para ello, se sigue la metodología Seis Sigma basada en búsqueda de evidencias que reduzcan las sospechas de partida y se utilizan herramientas como histogramas, gráfico de cajas, series temporales, multi-vari y estudios de capacidad.
Los resultados obtenidos en la etapa MEDIR (fase de descripción) ayudaron al Diagnóstico de la Situación de partida y a identificar que las fuentes de variación estaban en el corto plazo, dentro de las huellas del molde, y no en las posibles variaciones del largo plazo provenientes de materias primas, etc. VISUALIZAR LA GRABACIÓN ⇒
Fase de predicción
En esta fase el objetivo es explorar la información de grandes bases de datos multi-factorial tanto en la identificación de observaciones anómalas como en la identificación de factores que podrían explicar la variabilidad. Para ello, se sigue la metodología Seis Sigma basada en analizar la calidad del dato, llevar la sabiduría del proceso a la estructura de la base de datos, …, y contemplar los resultados con unas gafas especiales y se utilizan herramientas como gráficos de dispersión, matrices de correlación, dendrogramas, análisis de componentes principales, modelos de regresión múltiple, PLS y modelos de clasificación CART.
En la etapa ANALIZAR se profundizó en las causas raíz de esta variación descartando temas metalúrgicos, etc. y centrando el estudio en identificar geometrías que podrían explicar la variación en las frecuencias. Se utilizaron técnicas de modelización y clasificación de Minitab y se llegó a un conjunto de cotas explicativas que estaban correlacionadas con el parámetro de frecuencia de interés. VISUALIZAR LA GRABACIÓN ⇒
Fase de identificación de causas
En esta fase el objetivo es establecer una manera de proceder en la recogida de datos a partir de diseño de experimentos que den lugar a modelos predictivos y causales que permitan optimizar la función deseada. Para ello, se sigue la metodología Seis Sigma basada en identificar entre las relaciones de correlación aquellas que son causales. Utilizando diseños de experimentos simples y factoriales se realizan experimentos moviendo todos los factores a la vez según una propuesta de Minitab que permite estimar las relaciones y obtener máxima información con un número bajo de recursos en experimentación.
En la última etapa se identificó la causa raíz mediante la realización de Diseño de Experimentos con las variables que aparecían en los modelos predictivos para comprobar si eran causas de la variación y obtener un conjunto de parámetros que fueran elementos clave de diseño. VISUALIZAR LA GRABACIÓN ⇒
Sobre Fagor Ederlan Group
![]() Fagor Ederlan (FE) es un grupo empresarial perteneciente al Grupo Mondragon líder en componentes de automoción. El grupo se caracteriza por una constante pro-actividad en incorporar en su cultura metodologías de Excelencia Operacional, buenas prácticas, etc. Como ejemplo, hace 10 años llevaron a cabo un notable esfuerzo para incorporar en su propio Programa de Excelencia Operacional, KALDA, partes de la metodología Seis Sigma con la colaboración de Mondragon Unibertsitatea y bajo la supervisión de la Dra. Lourdes Pozueta de Avancex+i. Uno de los frutos de esta magnífica experiencia fue la realización de la Tesis Doctoral "Desarrollo de un modelo para abordar proyectos de mejora continua de procesos productivos de forma eficaz y eficiente" que recoge buenas prácticas como la de esta sesión, en menor detalle.
Fagor Ederlan (FE) es un grupo empresarial perteneciente al Grupo Mondragon líder en componentes de automoción. El grupo se caracteriza por una constante pro-actividad en incorporar en su cultura metodologías de Excelencia Operacional, buenas prácticas, etc. Como ejemplo, hace 10 años llevaron a cabo un notable esfuerzo para incorporar en su propio Programa de Excelencia Operacional, KALDA, partes de la metodología Seis Sigma con la colaboración de Mondragon Unibertsitatea y bajo la supervisión de la Dra. Lourdes Pozueta de Avancex+i. Uno de los frutos de esta magnífica experiencia fue la realización de la Tesis Doctoral "Desarrollo de un modelo para abordar proyectos de mejora continua de procesos productivos de forma eficaz y eficiente" que recoge buenas prácticas como la de esta sesión, en menor detalle.
- Detalles
- Categoría: Maple
- Visto: 4312
El nuevo Maple Flow 2022 ofrece una variedad de mejoras de productividad que agilizan el flujo de trabajo.
- Ayuda de producto mejorada. Un nuevo sistema de ayuda integrado contiene únicamente las páginas de ayuda que se necesitan, y las muestra como documentos de Maple Flow. Como resultado, ahora es mucho más rápido y fácil encontrar las respuestas a lo que se está buscando, y la información es más fácil de utilizar ya que pueden copiarse y pegarse ejemplos en el propio documento.
- Proceso de instalación simplificado. Maple Flow ya no requiere más una instalación de Maple separada para poder funcionar, así que solo es necesario instalar y activar un único producto: Maple Flow.
- Más opciones de formateo. Ahora se pueden utilizar colores de fondo para fijar la atención a resultados importantes o grupos de contenedores.
- Rendimiento mejorado. Los documentos se actualizan más rápidamente cuando se cambia un parámetro.
- Actualizaciones de usabilidad. Varias mejoras en la interfaz hacen que Maple Flow sea más fácil de usar, incluyendo:
- Puede utilizarse Tab para recorrer los marcadores de posición de una plantilla de expresión
- El reposicionamiento de vectores, matrices y arrays en el lienzo es más fluido
- Después de borrar un signo igual utilizado para evaluación, el resultado ahora desaparece