- Detalles
- Categoría: Signals ChemDraw
- Visto: 1936
Transformación digital en la industria de productos químicos especializados
INTRODUCCIÓN
La innovación es crucial para el crecimiento sostenible a largo plazo en cualquier industria. Las tendencias recientes están impulsando a las empresas de productos químicos especializados y afines a reconsiderar sus modelos operativos de laboratorios de I+D. Los avances en tecnología e instrumentación, junto con las necesidades de los consumidores y el mercado, han alterado el statu quo, y el enfoque tradicional para el desarrollo de productos puede que ya no sea viable.
Con la enorme cantidad de cambios en la industria, el auge de las tecnologías digitales puede ayudar a las empresas a aplicar la toma de decisiones basada en datos, derivada de la ideación, la gestión de datos y el análisis, lo que puede acelerar los avances innovadores necesarios para mantenerse competitivos.
Todas las empresas químicas utilizan algunas tecnologías digitales, pero la mayoría lo hace de manera limitada y en silos para atender necesidades específicas. Las empresas líderes están avanzando hacia lo que se conoce como transformación digital, la adopción e integración de herramientas digitales en toda la operación de la organización. Esta transformación permite a las organizaciones satisfacer las necesidades del mundo con mejores productos ahora y en el futuro.
Un aspecto fundamental de la transformación digital es aprovechar las últimas tecnologías basadas en la nube en la investigación y el desarrollo (I+D). Sin esta transformación, el proceso de desarrollar nuevos productos es fragmentado, con investigadores trabajando de forma aislada, perdiendo tiempo buscando datos y, a menudo, repitiendo experimentos porque los resultados anteriores no están fácilmente accesibles. También enfrentan enormes desafíos para analizar grandes cantidades de datos experimentales y tomar decisiones acertadas.
Por el contrario, con las herramientas digitales más recientes, las empresas químicas pueden acelerar la innovación de productos a través de tres fases principales de investigación: Planear, gestión de datos y análisis, como se describe a continuación y en la Tabla 1.
- Planear: La tecnología avanzada y el software permiten a los químicos industriales aprovechar eficazmente los datos existentes de investigaciones internas y externas, procesar esos datos para formular hipótesis y planes experimentales para desarrollar nuevos productos.
- Gestión de datos: A medida que los investigadores realizan experimentos, las herramientas digitales avanzadas proporcionan acceso a todos los datos y herramientas en una sola interfaz y les permiten utilizar los datos de manera efectiva con características como la creación de plantillas y el etiquetado. Además, colaboran fácilmente con colegas, equipos y organizaciones en tiempo real.
- Análisis: Utilizando flujos de trabajo personalizables de procesamiento de datos que aprovechan el análisis estadístico, la minería de datos, el aprendizaje automático y la inteligencia artificial, los químicos pueden dar sentido a los datos multiparamétricos y adoptar enfoques matemáticamente rigurosos para las decisiones sobre productos, así como identificar posibles áreas futuras de crecimiento.
 |
 |
 |
 |
| PLANEAR ¿Cómo crean los investigadores nuevos productos químicos? Las herramientas digitales permiten:
|
GESTIÓN DE DATOS ¿Cómo registran y comparten los investigadores sus datos? Las herramientas digitales permiten:
|
ANÁLISIS ¿Cómo toman decisiones los investigadores en torno al desarrollo de productos? Las herramientas digitales permiten:
|
PRODUCTO FINAL |
La mejor gestión y análisis de datos, incluida la captura de datos de los consumidores sobre el uso y el rendimiento de los productos, pueden mejorar aún más el ciclo, creando el crecimiento e innovación sostenibles necesarios para satisfacer las cambiantes necesidades del mercado y las demandas de los consumidores.
Esta serie de artículos explora cómo la transformación digital en todo el proceso de desarrollo de productos puede llevar a un desarrollo más rápido mediante un mejor uso de los datos, la colaboración y el poder computacional. Al abordar cómo las herramientas digitales avanzadas pueden ayudar específicamente en cada paso del desarrollo de productos—ideación, gestión de datos y análisis—los químicos pueden comenzar a comprender los beneficios potenciales de la transformación digital completa para sus organizaciones y la industria.
Haz clic aquí para ver una DEMO interactiva
CAPÍTULO 1
Acelerando el paso de la lluvia de ideas al laboratorio
El universo de productos químicos es vasto y variado. Solo en Estados Unidos, la industria química produce decenas de miles de productos. Sin embargo, independientemente de lo que se esté fabricando, ya sea una pintura resistente al agua o un plástico biodegradable, cada producto nuevo o mejorado comienza con una idea.
Durante la fase de planteamiento, los investigadores evalúan los datos existentes para identificar productos potenciales con un uso final particular. También desarrollan una hipótesis comprobable y diseñan experimentos para analizar métricas específicas que ayuden a identificar el mejor candidato. Para obtener una mayor cuota de mercado y mayores beneficios, este trabajo debe realizarse rápidamente.
El proceso iterativo de decidir qué parámetros probar, cómo probarlos y en qué orden es la primera mitad de lo que se conoce como diseño de experimentos (DOE, por sus siglas en inglés); la segunda mitad consiste en realizar las pruebas. Las condiciones de prueba a menudo son multiparamétricas y pueden involucrar combinaciones de presión, temperatura, tiempo u otras métricas. Estos indicadores cuidadosamente seleccionados darán a los científicos una idea de cómo se desempeñarán los posibles productos bajo diversas condiciones relevantes para su uso final.
Históricamente, el DOE ha sido descrito más como un arte que como una ciencia. Durante el DOE, los expertos utilizan sus conocimientos sobre el producto y las técnicas de prueba disponibles para determinar de manera reflexiva qué conjunto de métricas y variaciones probar y en qué orden.
Sin embargo, los productos químicos, los materiales, las formulaciones y los mercados se han vuelto cada vez más complejos, y depender únicamente del poder de procesamiento humano ya no es un enfoque adecuado.
Un conjunto de herramientas digitales ampliado
El conjunto de herramientas digitales disponibles para los químicos ha crecido junto con el volumen y la diversidad de productos químicos. El químico actual puede aprovechar estas herramientas avanzadas para acelerar la fase de ideación del desarrollo. El acceso a datos almacenados de manera centralizada, habilitado por el almacenamiento en la nube, y el software que integra capacidades de búsqueda en la literatura, ayudan a los químicos a entender qué es lo que ya existe en su espacio químico.
"Las empresas podrían ser mucho más productivas en su investigación si aumentan sus recursos de tecnología digital".
— Tom Runge, químico de procesos y fundador de Runge Consulting
Al tener los datos existentes al alcance de la mano, los químicos pueden formular hipótesis y planes experimentales de manera más eficiente. Esto les permite dedicar menos tiempo a la planificación y más tiempo a concentrarse en los experimentos y en la identificación de candidatos.
Aprovechar los datos pasados para un mejor DOE
Tom Runge, un químico de procesos que fundó Runge Consulting, dice que integrar las últimas herramientas digitales en la ideación y planificación experimental es clave para acelerar la investigación. Ha comprobado que cuando los investigadores se concentran en realizar experimentos, una organización aumenta las posibilidades de que su producto llegue al mercado antes que la competencia.
Runge, quien trabajó en las industrias química y farmacéutica antes de iniciar su negocio de consultoría, observó que los investigadores que no utilizan herramientas digitales avanzadas pasan más tiempo revisando datos para realizar DOE en nuevos productos.
"Es preferible obtener la mayor cantidad de información de todos los experimentos realizados anteriormente que tratar de configurar nuevos desde cero"
"Las empresas podrían ser mucho más productivas en su investigación si aumentan sus recursos tecnológicos digitales"
.Pero para obtener sabiduría de los experimentos pasados, los científicos deben poder acceder y evaluar el historial experimental. Se estima que el 55% de los datos almacenados por las organizaciones son datos oscuros, es decir, datos difíciles de acceder y que se dejan sin utilizar. Puede ser un proceso laborioso y que consume tiempo si los científicos tienen que recopilar manualmente los datos para encontrar la información química relevante.
Los investigadores pueden verse obligados a buscar en la literatura utilizando SciFindern o Google Scholar en un navegador, acceder a los datos experimentales pasados de sus cuadernos digitales en un servidor local, y enviarse correos electrónicos con colaboradores para intercambiar datos e ideas.
Adoptar herramientas digitales avanzadas significa que los investigadores no tienen que pasar tiempo buscando y ensamblando datos existentes. En su lugar, el software hace el trabajo por ellos.
El software inteligente ayuda a los investigadores a encontrar datos existentes y unificarlos, proporcionando recomendaciones y visualizaciones antes incluso de que comiencen a realizar un experimento. Esto puede ayudar a acelerar el tiempo de llegada al mercado, que siempre es uno de los objetivos más importantes del desarrollo de productos.
Consultas químicas fáciles
"¿Dónde están mis datos?"
Esa puede ser una de las primeras preguntas que los investigadores se hacen al inicio del proceso de planteamiento. Durante experimentos pasados, los investigadores pueden haber registrado estructuras químicas o reacciones utilizando software como ChemDraw® de Revvity Signals y luego haber copiado la estructura en otra aplicación, como Microsoft Word o PowerPoint, donde se almacena la información a largo plazo.
"Una vez que los datos están dentro de un documento de Microsoft Office, están esencialmente muertos y enterrados",
dice Pierre Morieux, gerente global de marketing de productos para Revvity Signals.
"Se requiere mucho esfuerzo o una muy buena memoria para que los investigadores los reutilicen o hagan algo significativo con ellos".
Los investigadores tendrían que localizar el archivo y la página con la información relevante y luego extraerla para su nuevo uso. Las herramientas enfocadas en la química, como ChemDraw, integradas en Signals Notebook, ayudan a acelerar el proceso de encontrar datos químicos.
"ChemDraw puede tomar esos dibujos químicos dispersos y ayudarlos a transformarlos en una base de datos de conocimiento químico fácilmente accesible", dice Morieux.
El programa extrae estructuras químicas e información relacionada de un documento, tal vez un archivo de Word o una presentación de PowerPoint, y las lleva al entorno de ChemDraw Collection sin tener que encontrar o abrir el documento original. Los dibujos químicos pueden seleccionarse, copiarse y pegarse en un nuevo documento o en ChemDraw para realizar más ediciones.

Los investigadores también pueden crear y gestionar listas personalizadas de moléculas basadas en propiedades definidas por el usuario. Por ejemplo, aquellos que desarrollan nuevos tintes sintéticos pueden agregar compuestos con ciertas propiedades, como la pigmentación, a listas específicas. Luego, pueden revisar rápidamente la colección de compuestos cuando buscan diseñar un tinte con propiedades de pigmentación específicas. Los registros y listas químicas pueden mantenerse y actualizarse en tiempo real, por lo que los investigadores cuentan con la base de datos más actualizada con la que trabajar.
"Esto permite a los investigadores reciclar, reutilizar y reaprovechar los datos químicos ya existentes sin tener que adivinar en qué documento están almacenados", dice Morieux.
El acceso fácil a los datos puede acelerar el proceso de ideación. Una vez que los científicos comprenden lo que se ha hecho, pueden comenzar a identificar qué productos químicos, formulaciones o materiales existentes tienen características que pueden cumplir con los requisitos del nuevo producto.
CASO PRÁCTICO
Acelerando la identificación de objetivos con herramientas digitales avanzadas
Con herramientas digitales que no están diseñadas específicamente para químicos, como Microsoft Excel, los investigadores podrían verse obligados a identificar y evaluar individualmente los conjuntos de candidatos para nuevos fungicidas u otros productos de protección de cultivos, lo que podría limitar el número de opciones que pueden explorar. Dependiendo del producto y su aplicación, el número de compuestos potenciales podría superar el que un ser humano puede evaluar y procesar en un tiempo razonable.
La empresa de agroquímicos identificó los siguientes desafíos para los químicos agrícolas:
- Los datos estaban fragmentados y eran difíciles de consultar, lo que hacía que la revisión de los datos fuera un proceso que consumía mucho tiempo durante la identificación de candidatos.
- A lo largo de la I+D, desde la selección de compuestos hasta la elaboración de informes, se utilizaban diversos software y herramientas digitales, lo que hacía que el proceso fuera discontinuo.
- Se necesitaban gráficos que visualizaran y comunicaran efectivamente los datos químicos para identificar los candidatos prometedores.
- Para abordar estos desafíos, la empresa decidió incorporar la solución de análisis de datos Signals Inventa, parte del conjunto Signals Research Suite, en su flujo de trabajo de I+D. El acceso a datos basado en la nube, facilitado por Signals Data Factory, un componente adicional de almacenamiento, permitió un acceso y consulta rápidos de datos almacenados tanto interna como externamente. Esto permitió a los investigadores acceder rápidamente a datos experimentales pasados, estructuras químicas y reacciones en una sola interfaz.
Para identificar mejor los candidatos a productos prometedores a partir de datos experimentales pasados, los investigadores utilizaron Signals Inventa, que incorpora análisis de datos y visualización habilitados por Spotfire®, un potente motor de análisis de datos científicos con licencia exclusiva de Revvity Signals. El líder de I+D que dirigía el proyecto describió la plataforma como "consulta de datos impulsada por pruebas de manera fácil", con la capacidad de filtrar por pruebas, datos o proyectos específicos; buscar por estructuras químicas o criterios de actividad; y analizar resultados en tiempo real.
Las visualizaciones de datos químicos ayudaron a los investigadores a reducir aún más la selección del panel de pruebas identificando tendencias en los datos pasados. Por ejemplo, utilizaron la técnica de análisis conocida como descomposición de grupos R (Figura 3) para comprender mejor las relaciones estructura-función en el contexto de su química. En este análisis, una estructura central—un esqueleto—se utiliza como consulta de búsqueda para identificar todas las moléculas químicas que contienen esa estructura esquelética. Los brazos químicos que se extienden desde el esqueleto en distintos sitios de unión, los grupos R, pueden identificarse, analizarse y correlacionarse con propiedades químicas y físicas determinadas a partir de experimentos anteriores. De esta manera, los químicos pueden descomponer un panel de estructuras químicas para comprender qué grupos R y patrones de unión pueden proporcionar las características deseadas para un nuevo producto.
Esto permite a los científicos agrícolas comenzar con un gran panel de posibles agentes de protección y reducirlo a un subtipo específico, como fungicidas, y luego concentrarse en las características químicas específicas necesarias para la nueva aplicación. De esta manera, los investigadores pueden utilizar sus datos pasados para comprender mejor qué moléculas candidatas potenciales podrían ser exitosas.
¿Quieres conocer más beneficios sobre la introducción de la transformación digital en la industria química?
¡Mantente atento!
- Detalles
- Categoría: Comsol
- Visto: 1692
Introducción/Objetivo
Los sistemas de almacenamiento de energía térmica sensible (TES) [1] que utilizan agua como medio de almacenamiento tienen gran aplicación en el sector de la calefacción. El estudio de Krüger et al. [2] publicado en la revista Journal of Energy Storage de la editorial Elsevier investiga, utilizando COMSOL Multiphysics® la relación de aspecto de un tanque de TES (definida como la relación entre la altura y el diámetro del tanque de almacenamiento) afecta la eficiencia del almacenamiento de energía, la estratificación térmica y el rendimiento exergético.
Modelización
La Figura 1 muestra el esquema del modelo bidimensional y axisimétrico desarrollado en COMSOL Multiphysics de un TES de 4 300 m3 [3], y también de sus condiciones de contorno. El modelo incorpora ecuaciones las ecuaciones de conducción de calor en las partes sólidas (aislamientos y paredes) sin generación de calor, y las ecuaciones de Navier-Stokes para el agua, considerada como fluido incompresible y considerando convección natural. El enfoque bidimensional y axisimétrico de COMSOL permite reducir el coste computacional y simular el comportamiento del tanque TES durante las fases de carga, descarga y reposo. Se estudiaron de aspecto entre 1 y 4 para analizar sus efectos, por ejemplo, en la distribución de temperatura.
Resultados/Conclusiones
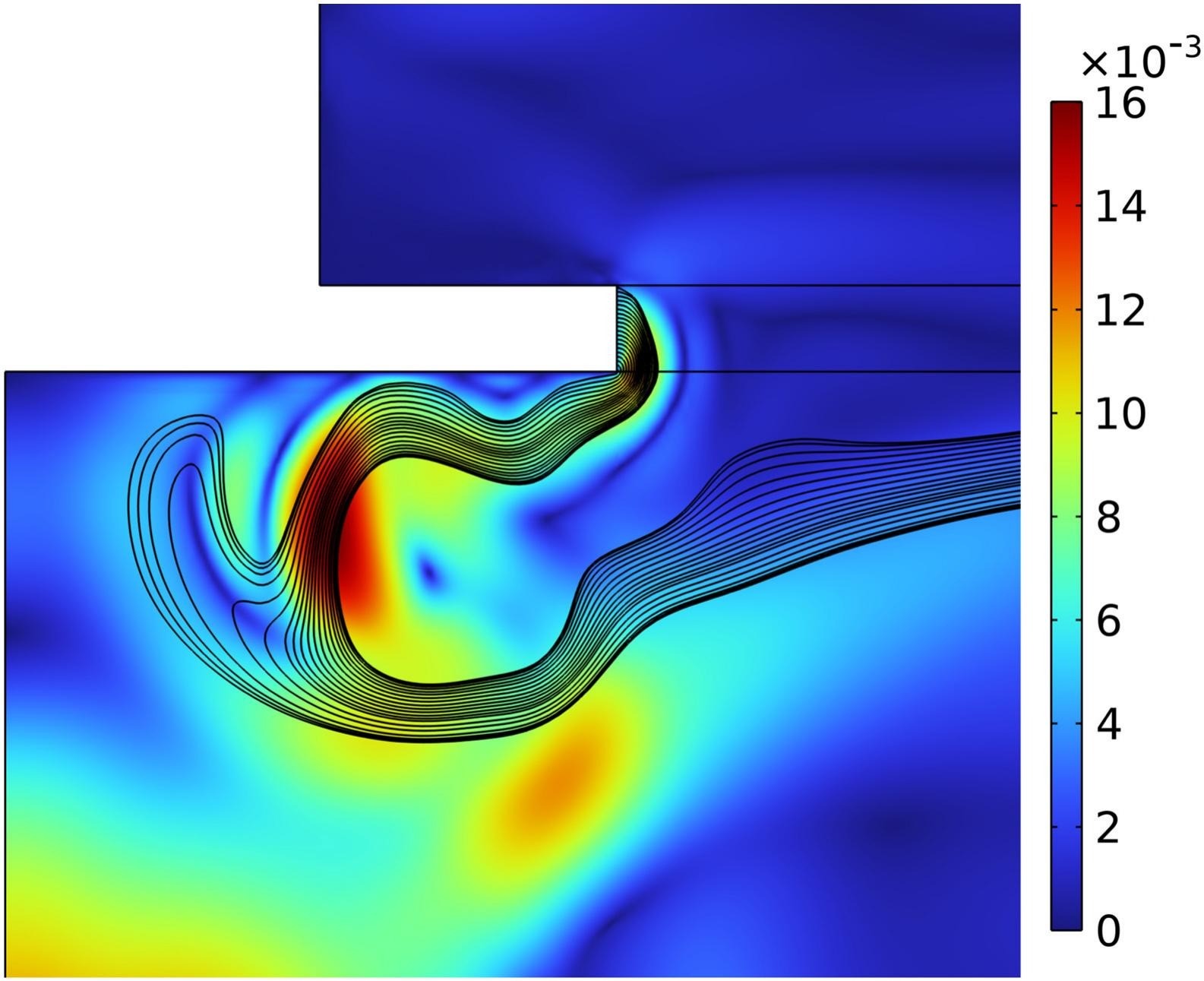
Las simulaciones mostraron que, al aumentar la relación de aspecto, en general, se mejora la estratificación térmica, pero también aumentan las pérdidas de calor debido a una mayor área superficial. La estructura del flujo del agua que entra al tanque por la parte superior se define principalmente por su temperatura, como se muestra en la Figura 2 (a). La Figura 2 (b) muestra el campo de temperatura dentro de todo el almacenamiento transcurridas 16 horas y 45 minutos. Las flechas indican la dirección y la magnitud del flujo del fluido dentro del almacenamiento. El movimiento descendente de la inversión térmica cerca de la línea central es claramente visible en la parte superior del tanque.
Este artículo pone de manifiesto el potencial COMSOL Multiphysics® como herramienta para modelizar, simular numéricamente y optimizar el diseño sistemas de almacenamiento de energía térmica.
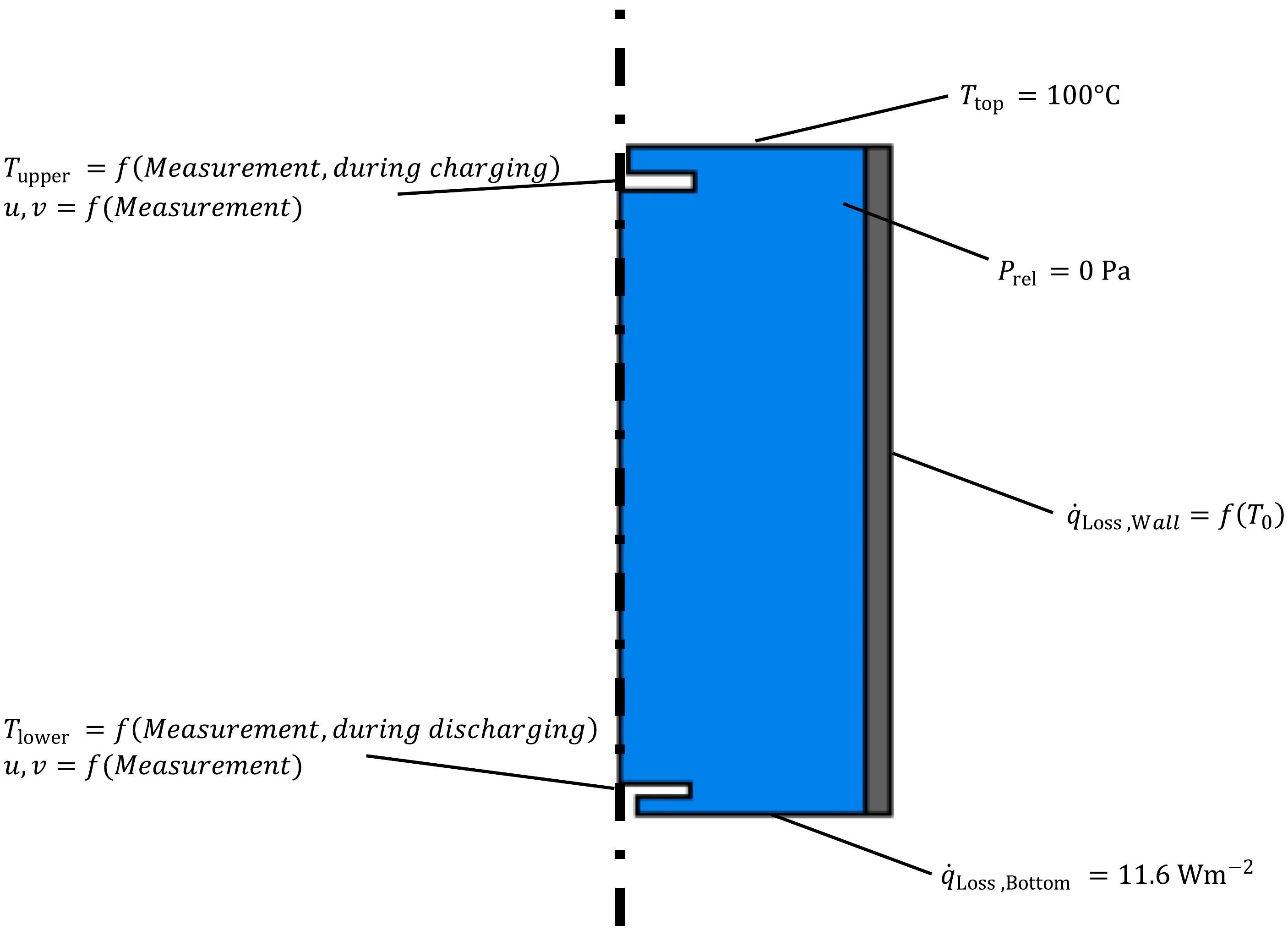
Figura 1. Representación esquemática del modelo numérico y sus condiciones de contorno.
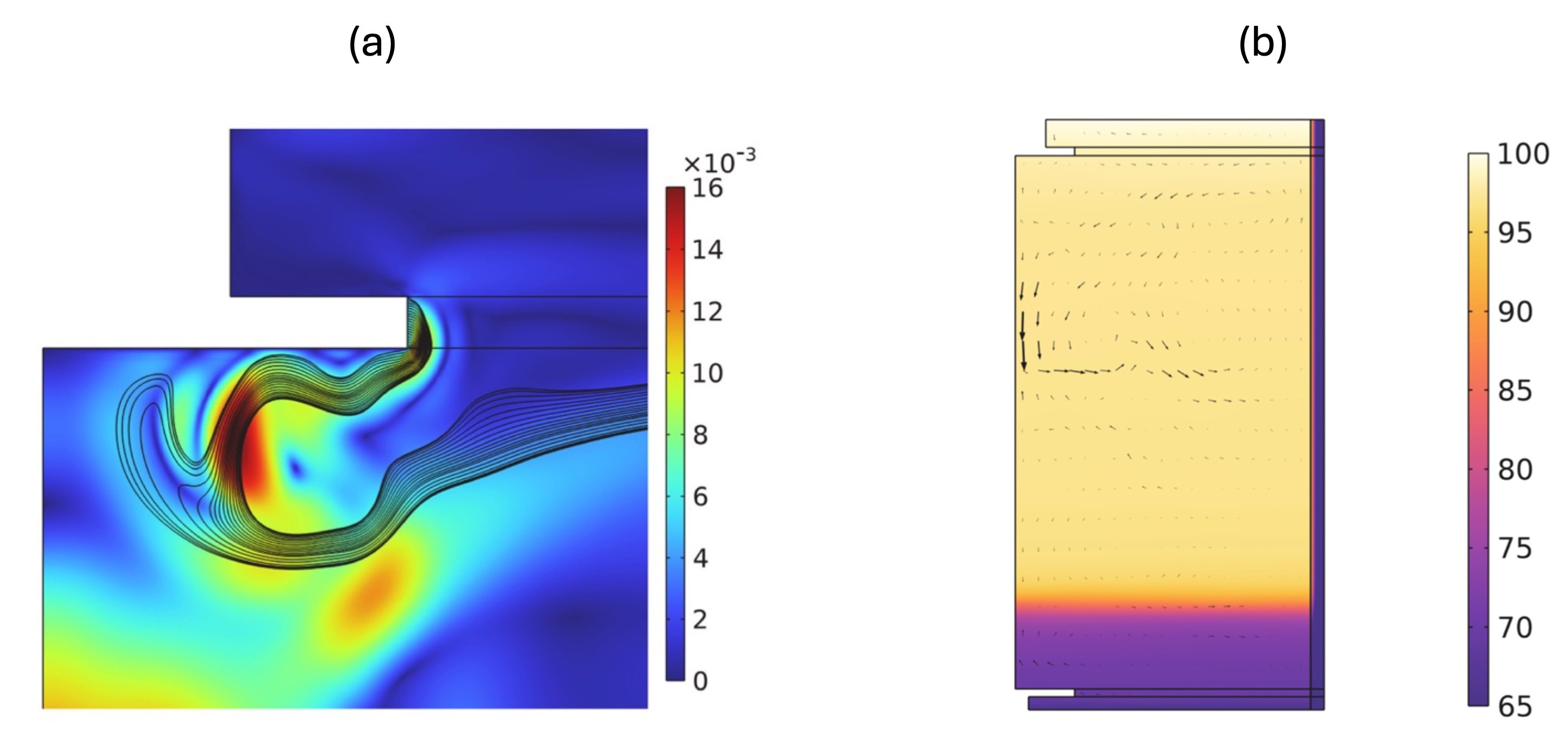
Figura 2. (a) Magnitud de la velocidad del flujo en m/s y líneas de corriente cerca del difusor radial superior del tanque durante el proceso de carga. (b) Campo de temperatura en °C en el tanque después de 16 horas y 45 minutos. Las flechas indican la dirección y la magnitud del flujo del fluido dentro del almacenamiento. La flecha más grande corresponde a una magnitud de velocidad de 1.2 cm/s.
Referencias
[1] L. Miró, J. Gasia, L.F. Cabeza. Thermal energy storage (TES) for industrial waste heat (IWH) recovery: A review. Applied Energy (2016) 179, 284-301.
[2] B. Krüger, F. Dammel , P. Stephan. Investigating the aspect ratio’s influence on the exergetic performance and thermocline dynamics of a large water-based thermal energy storage system. Journal of Energy Storage 91 (2024) 112058.
[3] ENTEGA AG. https://www.entega.ag
- Detalles
- Categoría: Maple
- Visto: 1562
Maplesoft anuncia el lanzamiento de actualizaciones para sus productos MapleSim 2024 y Maple 2024, además de una próxima actualización para Maple Flow 2024 en pocos días.
Los detalles de estas actualizaciones se encuentran a continuación:
Actualizaciones de MapleSim y Maple
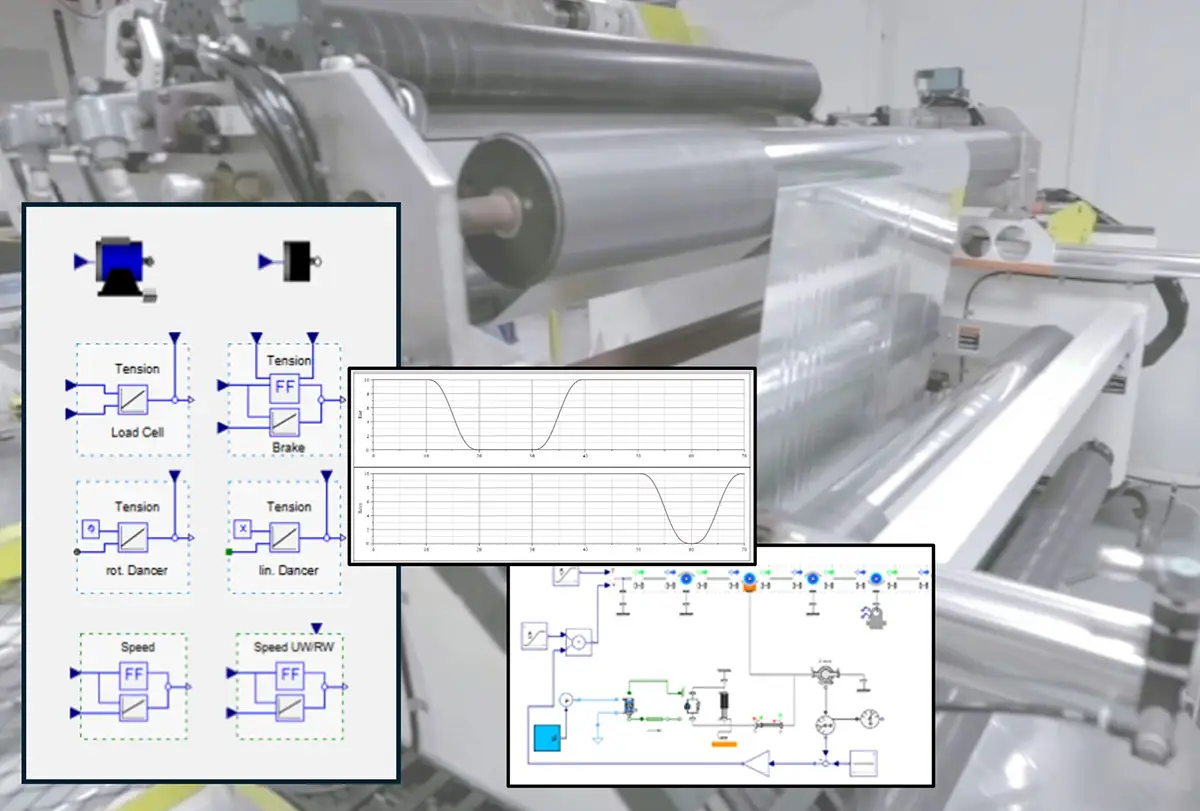
La actualización de MapleSim 2024.2 incluye mejoras en la biblioteca hidráulica incorporada, MapleSim CAD Toolbox y el complemento MapleSim Web Handling Library, así como actualizaciones de compatibilidad con otros complementos y MapleSim Insight. Hay más información sobre esta versión disponible en MapleSim 2024.2 release notes..
La actualización de mantenimiento de Maple 2024.2 incluye mejoras en la interfaz, la exportación/impresión de PDF, el motor matemático y más.
Ambas actualizaciones están disponibles para los clientes a través de los mecanismos integrados de Verificar actualizaciones (Check for Updates), que se activarán en breve, y desde la sección de descargas del sitio web de Maplesoft.
Maple Flow
Maple Flow 2024.2 se lanzará a principios de noviembre. Esta actualización aumentará la facilidad y flexibilidad para introducir valores en Maple Flow, incluidas asignaciones de variables sencillas a través de listas desplegables y más formas de introducir unidades. Los detalles estarán disponibles en la página Maple Flow release notes en el sitio web de Maplesoft a principios de noviembre.
Esta actualización estará disponible en la sección descargas del sitio web de Maplesoft. Una vez que se haya publicado, Maplesoft enviará una comunicación por correo electrónico a todos los clientes de Maple Flow 2024 para informarles sobre esta actualización y cómo obtenerla.
- Detalles
- Categoría: BIOVIA
- Visto: 1575

Acelere la innovación en la investigación y el desarrollo de las ciencias de la vida
La industria biofarmacéutica actual está marcada por la complejidad: crecientes demandas del mercado de una mayor especificidad y seguridad, nuevas clases de tratamiento y mecanismos de enfermedad más intrincados. Mantenerse al día con esta complejidad requiere una comprensión más profunda del comportamiento terapéutico.
Las soluciones de BIOVIA Biosciences permiten a los investigadores probar conceptos con un riesgo mínimo y costes más bajos, desbloqueando nuevas vías de ideas para explorar. Si bien el modelado y la simulación (MODSIM) proporciona una instantánea de las interacciones atómicas fundamentales que respaldan el rendimiento del producto, el aprovechamiento del poder de la inteligencia artificial (IA) puede automatizar la creación, las pruebas y la selección virtuales de nuevas moléculas pequeñas de alta calidad. Al combinar datos virtuales y reales (V+R), los investigadores pueden identificar los candidatos a fármacos más prometedores más rápido, lo que reduce el coste de la experimentación y aumenta la eficiencia de la investigación y el desarrollo.
Principales ventajas de BIOVIA Biosciences
 ACELERE EL DISEÑO DE FÁRMACOS Identifique mejores medicamentos más rápido con modelado y simulación 3D e IA |
 TRANSFORME SU INVESTIGACIÓN CON V+R Mejore la velocidad y la calidad de su descubrimiento |
 MEJORE LA PRODUCTIVIDAD DE LA INVESTIGACIÓN Y EL DESARROLLO Reducir el número de experimentos y los costos asociados de investigación y desarrollo |
 FOMENTAR LA COLABORACIÓN Mejore la productividad del equipo y tome decisiones mejor informadas |
¿Qué software puede ayudarte con esto?
BIOVIA Discovery Studio es una plataforma integral de modelado molecular y simulación, diseñada para investigaciones en ciencias de la vida. Ofrece herramientas para el descubrimiento de fármacos, diseño de bioterapéuticos y ciencia de materiales. Sus funcionalidades incluyen simulaciones de dinámica molecular, acoplamiento proteína-ligando y análisis QSAR, permitiendo estudiar interacciones moleculares, optimizar candidatos terapéuticos y predecir perfiles de seguridad. Es usada ampliamente en la industria farmacéutica y biotecnológica para acelerar el desarrollo de terapias.
¿Quieres conocer más?
¡Pregúntanos!
- Detalles
- Categoría: MapleSim
- Visto: 2031

DesafíoAl diseñar robótica para aplicaciones de alta velocidad en espacios de trabajo grandes, el movimiento y las vibraciones se vuelven cada vez más difíciles de controlar con precisión. Como parte del Laboratorio de Robótica de Alta Velocidad de la Universidad de Waterloo, el Dr. Hamed Jamshidifar investiga tecnologías que pueden ayudar en el desarrollo de nuevas tecnologías robóticas. En un proyecto reciente, el Dr. Jamshidifar necesitaba nuevas técnicas para controlar con precisión el movimiento de un robot de cable de almacenamiento. Las técnicas de modelado que necesitaba debían tener en cuenta la dinámica compleja de los sistemas de cable que se encuentran en un sistema robótico de este tipo. SoluciónEl Dr. Jamshidifar utilizó MapleSim, la herramienta de modelado y simulación de Maplesoft, para desarrollar un modelo dinámico del robot de almacenamiento por cable. Al utilizar la biblioteca dedicada a cuerdas y poleas de MapleSim, pudo construir un modelo que pudiera reflejar con precisión el movimiento del robot y sus vibraciones no deseadas. Con un modelo suficientemente detallado en MapleSim, el Dr. Jamshidifar pudo desarrollar y probar estrategias de control para controlar las vibraciones y oscilaciones que se producen durante los movimientos del robot y la interacción con su entorno. ResultadoAl utilizar el modelo desarrollado en MapleSim, el Dr. Jamshidifar demostró con éxito una solución basada en simulación para controlar las vibraciones del robot. El modelo se creó a partir de un prototipo de robot a pequeña escala para validar la precisión, y las simulaciones mostraron la presencia de vibraciones no deseadas. Estas vibraciones se redujeron significativamente con las estrategias de control implementadas en MapleSim. El Dr. Jamshidifar seguirá utilizando los modelos de MapleSim para controlar y minimizar las vibraciones a medida que estos robots se incorporen a futuras aplicaciones comerciales. |
En los campos de la automatización industrial y el diseño de robótica, los desafíos de ingeniería se presentan en todas las etapas de desarrollo. Las máquinas suelen estar diseñadas para funcionar lo más rápido posible, ya que la velocidad es uno de los factores clave en la eficiencia de un entorno industrial. Sin embargo, el aumento de la velocidad de estas máquinas genera problemas nuevos y complejos que resolver. Cuando las máquinas funcionan a altas velocidades, los cambios tanto en la dirección como en la velocidad pueden provocar fuerzas significativas en los componentes de la máquina. Sin las estrategias de control adecuadas para máquinas de alta velocidad, los ingenieros corren el riesgo de dañar los componentes de la máquina, poniendo en peligro la seguridad tanto de la máquina como de los operadores cercanos.
Como parte del Laboratorio de Robótica de Alta Velocidad de la Universidad de Waterloo, el Dr. Hamed Jamshidifar investiga tecnologías que pueden ayudar en el desarrollo de nuevas tecnologías robóticas. Utiliza el modelado y la simulación como una estrategia clave para comprender mejor la dinámica de la robótica de alta velocidad. En un proyecto reciente, estaba estudiando la dinámica de un robot de almacenamiento de alta velocidad con cable. Estos robots están destinados a su uso en almacenes, donde los productos deben trasladarse por grandes espacios de trabajo a alta velocidad. Al aprovechar los sistemas de cable para mover el robot entre ubicaciones, el diseño del Dr. Jamshidifar puede proporcionar un funcionamiento más rápido que los robots de almacenamiento tradicionales.
Para alcanzar las altas velocidades posibles con el nuevo diseño del robot, el control del movimiento y la vibración sería una parte crucial del proceso de diseño. Sin controladores de alta fidelidad, el robot accionado por cable sería fácilmente susceptible a vibraciones no deseadas y otros movimientos no deseados que impedirían el rendimiento y podrían dañar los motores de accionamiento y el entorno circundante. El Dr. Jamshidifar eligió MapleSim, la herramienta de modelado y simulación de Maplesoft, como una tecnología clave para comprender la dinámica del robot y desarrollar sistemas de control que pudieran minimizar y controlar las vibraciones con precisión. Si bien existen otras herramientas de modelado y simulación, MapleSim ofrece una biblioteca dedicada a cuerdas y poleas que le permitió incorporar fácilmente la dinámica de los cables en sus simulaciones.
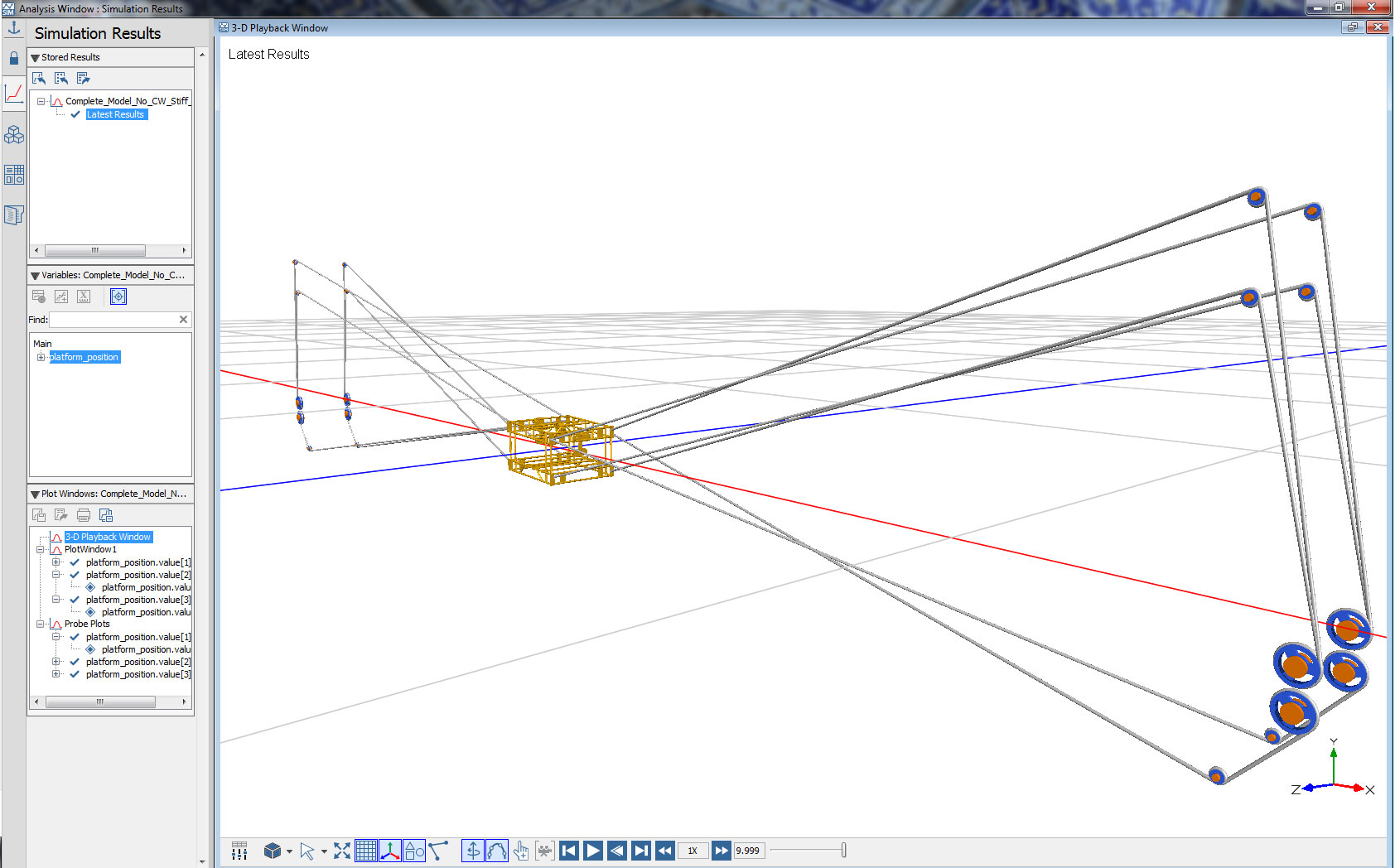
Figura 1: Una visualización 3D del modelo del Dr. Jamshidifar en MapleSim.
Para crear el modelo del robot en MapleSim, el Dr. Jamshidifar importó su modelo CAD preexistente de la plataforma móvil del robot. Al importar su modelo CAD, pudo importar automáticamente las geometrías de la plataforma, la información de masa e inercia y la información del modelo 3D para fines de visualización. Luego, el modelo se completó conectando componentes estándar de MapleSim, incluidas poleas, cabrestantes y cables. Para probar el modelo, los cabrestantes se accionaron mediante fuerzas simplificadas para simular el movimiento del robot a lo largo de una trayectoria de movimiento rectangular.
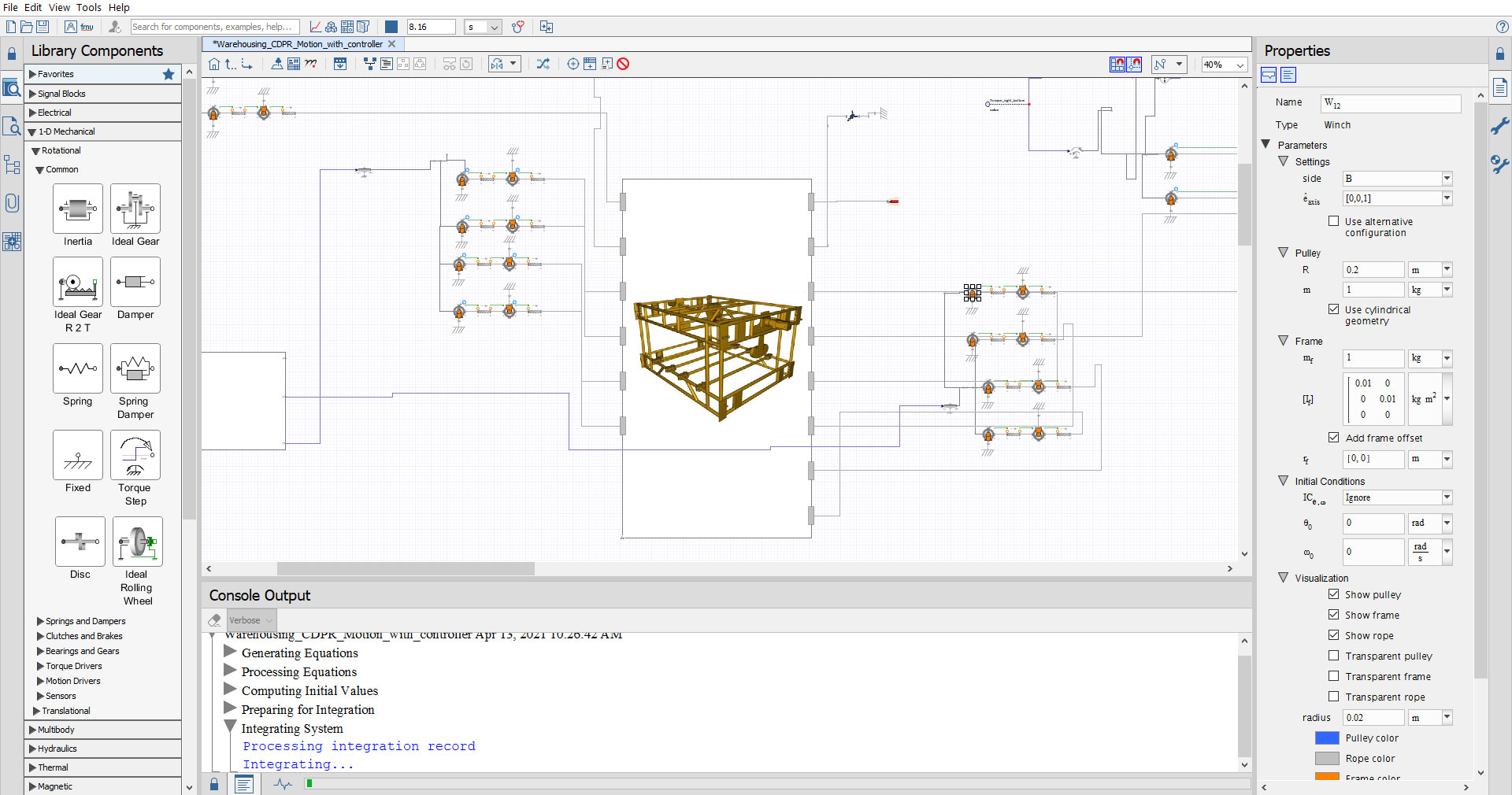
Figura 2: El modelo de robot de almacenamiento con cable en MapleSim, que muestra la plataforma central conectada a los sistemas de cable y cabrestante. Los parámetros del cabrestante se ven en el lado derecho del espacio de trabajo de MapleSim.
Para validar la precisión del modelo, los resultados de la simulación se compararon con un prototipo físico a pequeña escala que se había construido previamente. Esto garantizaría que la dinámica básica del modelo de MapleSim estuviera alineada con los resultados esperados durante la operación.
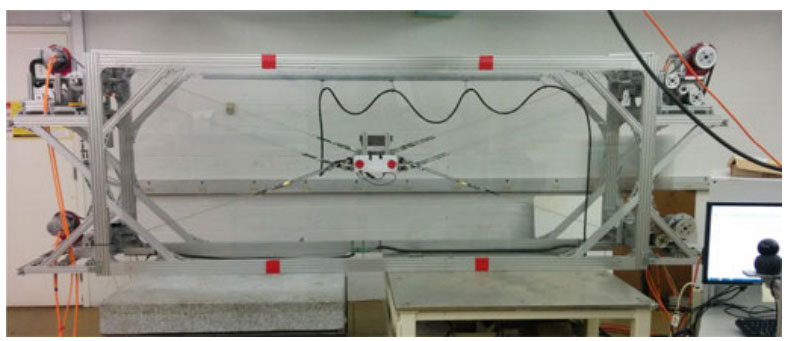
Figura 3: Un prototipo físico a pequeña escala del robot de almacenamiento accionado por cable.
Los resultados de la simulación del robot se pueden visualizar en MapleSim utilizando una representación en 3D de los sistemas de poleas en combinación con el CAD previamente importado. Los resultados iniciales de la simulación muestran las vibraciones problemáticas de la plataforma central. Sin un control de movimiento adecuado, estas vibraciones limitarían tanto la velocidad como la seguridad del funcionamiento del robot. El modelo de MapleSim se utilizaría para probar y validar varias estrategias de control para minimizar estas vibraciones, permitiendo al mismo tiempo las velocidades máximas de funcionamiento seguras.
El segundo conjunto de resultados de simulación muestra los resultados de una estrategia de control elemental para minimizar las vibraciones. El movimiento se comparó con los resultados anteriores, no controlados, y se mostró la cantidad de vibración que se eliminó durante el perfil de movimiento. Los resultados de simulación que se muestran son solo el producto de los intentos preliminares de reducir las vibraciones; el Dr. Jamshidifar tiene la intención de desarrollar estrategias de control y algoritmos que reducirán aún más las vibraciones en todas las condiciones de funcionamiento.
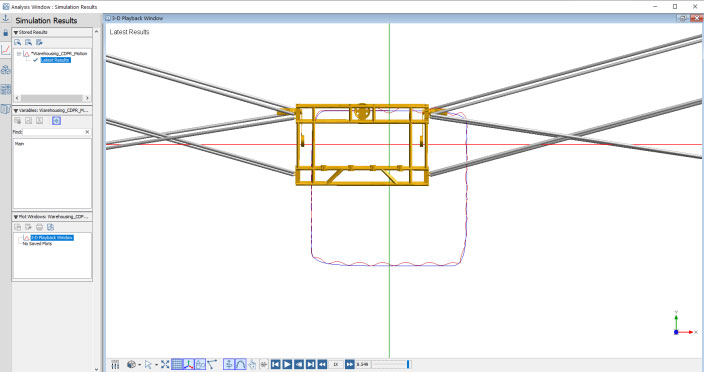
Figura 4: Resultados visuales de la vibración plana del modelo de robot de almacenamiento. Se traza la trayectoria del movimiento y se puede ver que oscila sin controladores de movimiento (izquierda), mientras que se muestra que los controladores de movimiento estabilizan el movimiento de la plataforma (derecha).
El Dr. Jamshidifar pudo demostrar que las vibraciones no deseadas en su robot de almacenamiento accionado por cable se podían minimizar con las estrategias de control correctas. Al continuar utilizando MapleSim para su investigación y desarrollo, podrá minimizar la posibilidad de problemas al desarrollar prototipos físicos, habiendo eliminado ya varios problemas en el modelo de MapleSim. A medida que continúa desarrollando el modelo del robot, el Dr. Jamshidifar planea utilizar sus modelos de MapleSim para desarrollar con precisión estrategias de control y algoritmos que puedan llevar robots más rápidos y mejores al mercado para aplicaciones de almacenamiento. El equipo ha desarrollado actualmente un prototipo a escala real, con planes de llevar el robot a los mercados comerciales en el futuro.
Figura 5: Un prototipo a escala real del robot de cable de almacenamiento.
- Detalles
- Categoría: Lakes
- Visto: 1984

A última hora de la tarde del 26 de septiembre de 2024, el huracán Helene tocó tierra en la región Big Bend de Florida. En ese momento, era una tormenta de categoría 4 y causó importantes impactos en el sureste de los Estados Unidos, con importantes repercusiones en el oeste de Carolina del Norte. Los Centros Nacionales de Información Ambiental (NCEI) de la Administración Nacional Oceánica y Atmosférica (NOAA), con sede en Asheville, Carolina del Norte, sufrieron cortes de energía y pérdida de conectividad de red durante varias semanas después de que se disipara la tormenta.
La mayoría de los servicios de datos se restablecieron a mediados de octubre y se proporcionaron actualizaciones en el sitio web del NCEI. Durante la interrupción, muchos modeladores de dispersión del aire no pudieron realizar el procesamiento necesario de los datos meteorológicos porque los datos de entrada proporcionados por el NCEI estaban fuera de línea y no estaban disponibles en ningún otro lugar.
Junto con la interrupción del NCEI se produjo la pérdida de un recurso de datos de larga data: la base de datos de radiosonda del Laboratorio de Sistemas de Pronóstico (FSL) de la NOAA. Anteriormente alojada en https://ruc.noaa.gov/raobs/, la base de datos FSL proporcionaba un fácil acceso a un largo registro histórico de observaciones de radiosonda globales. Los datos de FSL se han utilizado durante mucho tiempo en muchos preprocesadores meteorológicos como AERMET y CALMET.
Durante el esfuerzo de la EPA de EE. UU. por recodificar el modelo AERMET desde cero (publicado en 2022 como versión 22112), se agregó al modelo un nuevo formato de datos de la atmósfera superior: el Archivo Global Integrado de Radiosonda (IGRA) del NCEI. La inclusión fue fortuita porque la pérdida del archivo FSL habría dejado a los modeladores con pocas opciones alternativas. Siga leyendo para obtener más información sobre IGRA y su uso para el modelado de la calidad del aire.
¿Dónde puedo encontrar datos del IGRA?
El sitio web del NCEI tiene una página dedicada a IGRA en https://www.ncei.noaa.gov/products/weather-balloon/integrated-global-radiosonde-archive.
¿Dónde puedo descargar datos y cuál es el formato de archivo?
En la sección Data de la página web de IGRA, el bloque Sounding Data contiene enlaces para descargar datos de sondeo en formato IGRA. Se pueden descargar datos de períodos recientes (actualmente 2021-presente) o del período completo del registro de la estación seleccionada. A diferencia de la base de datos FSL, no se pueden descargar datos de un rango de fechas específico.
El formato es texto ASCII similar al FSL (aunque no idéntico). Los detalles del formato se especifican en el enlace Sounding Data Format que se encuentra en la página web.
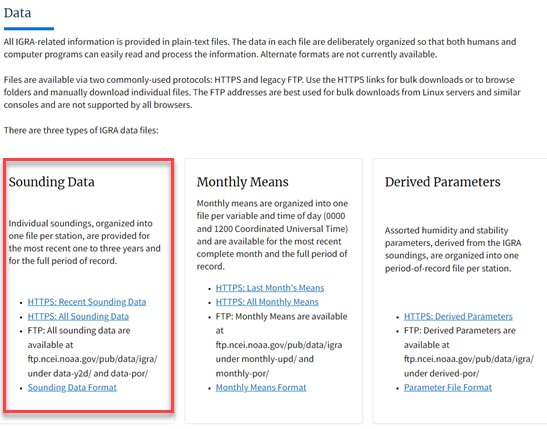
Sección Sounding Data Section de la Página Web del IGRA
¿Cómo puedo localizar datos de una estación específica?
La base de datos de IGRA contiene una carpeta de documentación que detalla información sobre los datos. Dentro de esta carpeta, encontrará un documento de lista de estaciones que detalla los números de identificación de las estaciones, los nombres, las coordenadas geográficas y los períodos de registro. Utilice esa lista para identificar la identificación de la estación de interés. Los archivos se nombran por el número de identificación de la estación.
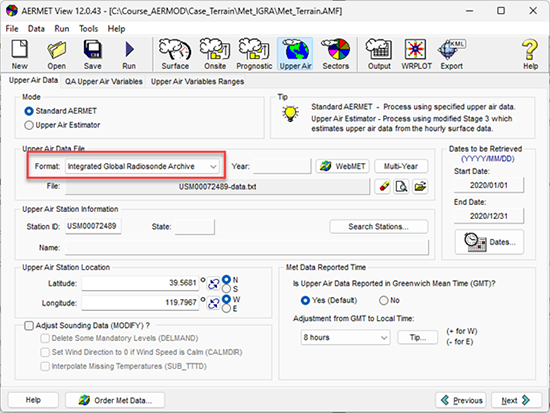
¿AERMET View de Lakes Software acepta datos IGRA?
¡Sí! Cualquier versión de AERMET View que incluya los modelos AERMET con fecha 22112 o 23132 puede leer datos IGRA. Vaya a la sección de datos Upper Air, seleccione IGRA en el menú desplegable Format e inserte el archivo de datos descargado como de costumbre.
- Detalles
- Categoría: Maple
- Visto: 2069

La disponibilidad de herramientas como Maple nos permite introducir un enfoque experimental en la investigación que hacemos en matemáticas, cuando es apropiado. En esta charla presentamos cuatro ejemplos concretos en los que el uso de Maple ha sido esencial para descubrir, conjeturar y, en algunos casos, demostrar nuevas propiedades de los objetos matemáticos que estábamos considerando, principalmente polinomios y matrices.
En el primer ejemplo mostraremos cómo el uso de Maple nos permitió proporcionar los primeros resultados no triviales sobre la Conjetura de Casas-Alvero, que pregunta si todo polinomio que tiene una raíz en común con cada una de sus derivadas (no siempre la misma raíz) es necesariamente una potencia de un factor lineal.
El segundo ejemplo mostrará cuán útil es Maple para determinar la estructura de los polinomios que describen la proyección de la intersección de un toro y una cuádrica.
El tercer ejemplo ilustrará cómo Maple ayuda a generar y caracterizar matrices de correlación cuando sus entradas son -1, 0 y 1.
El último ejemplo estará dedicado a presentar el uso de Maple para intentar probar (o refutar) una conjetura sobre la dispersión de una matriz simétrica (es decir, el valor absoluto máximo de la diferencia entre dos valores propios) con entradas en el intervalo cerrado [a,b].
Biografía del Dr. Laureano González Vega
El Dr. Laureano González Vega es Director del Departamento de Métodos Cuantitativos de la Universidad CUNEF y Catedrático de Álgebra de la Universidad de Cantabria (en excedencia). Es uno de los cofundadores de las conferencias EACA (Meetings on Computational Algebra and its Applications), y editor de La Columna de Matemática Computacional en La Gaceta de la Real Sociedad Matemática Española. Su actividad investigadora se centra en temas relacionados con el Álgebra Computacional, la Computación Simbólica y el Diseño Geométrico Asistido por Ordenador. Entusiasta de Maple desde la década de los 90, el Dr. González Vega ha hecho muchas contribuciones importantes al campo de las matrices y polinomios en álgebra computacional. Además, ha sido un firme defensor del uso de Maple en la investigación, promoviendo el enfoque experimental cuando es apropiado, y en la enseñanza para aumentar la comprensión y el interés de los estudiantes por las matemáticas. Este entusiasmo ha quedado plasmado en sus múltiples colaboraciones con Addlink Software Científico para dar a conocer las bondades de Maple para su uso en la universidad y en la industria.