- Detalles
- Categoría: Comsol
- Visto: 5923
Varios autores del Departamento de Ingeniería Eléctrica, Electrónica, Automática y Física Aplicada de la Universidad Politécnica de Madrid, el Departamento de Ingeniería Eléctrica de la Universidad Carlos III de Madrid y el State Key Laboratory of Electrical Insulation for Power Equipment de la Xi'an Jiaotong University en China; acaban de publicar en la revista Energies su trabajo "Comparison of Positive Streamers in Liquid Dielectrics with and without Nanoparticles Simulated with Finite-Element Software".
El trabajo realiza una comparación de la propagación de difusión del streamer positivo en tres configuraciones de tranformadores de aceite: aceite de transformador mineral, aceite de mineral con barreras dieléctricas sólidas y un nanofluido. Los resultados se obtuvieron utilizando el software de elementos finitos COMSOL Multiphysics.
- Detalles
- Categoría: Minitab
- Visto: 58873

Escoger el modelo de regresión lineal correcto puede ser difícil. Tratar de modelarlo con solo una muestra no lo hace más fácil. En esta publicación del blog de Minitab, se revisan algunos métodos estadísticos comunes para seleccionar modelos, las complicaciones con las que se puede enfrentar, y se proporcionan algunos consejos prácticos para elegir el mejor modelo de regresión.
Comienza cuando un investigador quiere describir matemáticamente la relación entre algunos predictores y la variable de respuesta. El equipo de investigación encargado de investigar suele medir muchas variables, pero solo incluye algunas de ellas en el modelo. Los analistas intentan eliminar las variables que no están relacionadas e incluyen solo aquellas con una relación verdadera. Por el camino, los analistas consideran muchos posibles modelos.
Se esfuerzan por lograr un equilibrio de Goldilocks con el número de predictores que incluyen.
- Muy pocos: un modelo subespecificado tiende a producir estimaciones sesgadas.
- Demasiados: un modelo sobrespecificado tiende a tener estimaciones menos precisas.
- Simplemente correcto: un modelo con los términos correctos no tiene sesgo y las estimaciones son más precisas.
Métodos estadísticos para encontrar el mejor modelo de regresión
Para disponer de un buen modelo de regresión, se desea incluir las variables que se están probando específicamente junto con otras variables que afecten a la respuesta para así evitar resultados sesgados. Minitab Statistical Software ofrece medidas y procedimientos estadísticos que le ayudan a especificar su modelo de regresión.
R cuadrado ajustado y R cuadrado previsto: Generalmente se eligen los modelos que tienen valores R cuadrado mejor ajustados y previstos. Estas estadísticas están diseñadas para evitar un problema clave con el R cuadrado regular: aumenta cada vez que se añade un predictor y puede engañar de forma que se especifique un modelo demasiado complejo.
- El R cuadrado ajustado aumenta solo si el nuevo término mejora el modelo más de lo que se esperaría por casualidad y también puede disminuir con predictores de mala calidad.
- El R cuadrado previsto es una forma de validación cruzada y también puede disminuir. La validación cruzada determina lo bien que el modelo se generaliza a otros conjuntos de datos mediante la partición de sus datos.
Valores P para los predictores: En regresión, los valores p bajos indican términos que son estadísticamente significativos. “Reducir el modelo” se refiere a la práctica de incluir todos los predictores candidatos en el modelo, y luego eliminar sistemáticamente el término con el valor p más alto uno por uno hasta que solo le quedan predictores significativos.
Regresión escalonada y Regresión de los mejores subconjuntos: son dos procedimientos automatizados que pueden identificar predictores útiles durante las etapas exploratorias de la construcción del modelo. Con la mejor regresión de subconjuntos, Minitab proporciona el Cp de Mallows, que es una estadística diseñada específicamente para ayudar a administrar la compensación entre la precisión y el sesgo.
Complicaciones del mundo real
Estupendo, existe una variedad de métodos estadísticos que nos ayudan a elegir el mejor modelo. Desafortunadamente, también hay una serie de posibles complicaciones. Pero no hay que preocuparse, ¡a continuación se proporcionan algunos consejos prácticos!
- El mejor modelo solo puede ser tan bueno como las variables medidas por el estudio. Los resultados de las variables que incluya en el análisis pueden estar sesgados por las variables significativas que no incluya. Lea acerca de un ejemplo de sesgo variable omitido.
- Su muestra puede ser inusual, ya sea por casualidad o por la metodología de recolección de datos. Falsos positivos y falsos negativos son parte del juego cuando se trabaja con muestras.
- Los valores P pueden cambiar según los términos específicos del modelo. En particular, la multicolinealidad puede minar la importancia y dificultar la determinación del papel de cada predictor.
- Si se evalúan suficientes modelos, se encontrarán variables que parecerán ser significativas, pero que sólo estarán correlacionados por casualidad. Esta forma de extracción de datos puede hacer que los datos aleatorios parezcan significativos. Un R-cuadrado previsto bajo es una buena manera de verificar este problema.
- Los valores de P, el R cuadrado ajustado y el Cp de Mallows pueden sugerir diferentes modelos.
- La regresión paso a paso y la regresión de los mejores subconjuntos son excelentes herramientas y pueden acercarse al modelo correcto. Sin embargo, los estudios han encontrado que generalmente no escogen el modelo correcto.
Recomendaciones para encontrar el mejor modelo de regresión
Elegir el modelo de regresión correcto es tanto una ciencia como un arte. Los métodos estadísticos pueden ayudar a orientar en la dirección correcta pero, en última instancia, se deben de incorporar otras consideraciones.
Teoría
Investigue lo que otros han hecho e incorpore esos hallazgos en la construcción de su modelo. Antes de comenzar el análisis de regresión, desarrolle una idea de cuáles son las variables importantes junto con sus relaciones, signos de coeficientes y magnitudes de efecto. Al basarse en los resultados de otros, es más fácil recopilar los datos correctos y especificar el mejor modelo de regresión sin la necesidad de la minería de datos.
Las consideraciones teóricas no deben descartarse basándose únicamente en medidas estadísticas. Después de ajustar su modelo, determine si se alinea con la teoría y si es posible haga ajustes. Por ejemplo, según la teoría, podría incluir un predictor en el modelo incluso si su valor p no es significativo. Si alguno de los signos del coeficiente contradice la teoría, investigue y cambie su modelo o explique la inconsistencia.
Complejidad
Podría pensar que los problemas complejos requieren modelos complejos, pero muchos estudios muestran que los modelos más simples generalmente producen predicciones más precisas. Dados varios modelos con capacidad explicativa similar, el más simple es probablemente la mejor opción. Comience de manera simple, y solo haga el modelo más complejo según sea necesario. Cuanto más complejo sea su modelo, más probable será que adapte el modelo específicamente a su conjunto de datos y la generalización sufra.
Verifique que la complejidad agregada en realidad produce intervalos de predicción más estrechos. ¡Compruebe el R cuadrado previsto y no persigas sin pensarlo un alto R cuadrado regular!
Gráficos de Residuos
A medida que evalúa los modelos, verifique los gráficos de residuos porque pueden ayudar a evitar modelos inadecuados y ajustar su modelo para obtener mejores resultados. Por ejemplo, el sesgo en modelos subespecificados puede mostrarse como patrones en los residuos, como la necesidad de modelar la curvatura. El modelo más simple que produce residuos aleatorios es un buen candidato para ser un modelo relativamente preciso e imparcial.
Al final, ninguna medida puede decirle cuál es el mejor modelo. Los métodos estadísticos no comprenden el proceso subyacente o el área temática. ¡Su conocimiento es una parte crucial del proceso!
- Detalles
- Categoría: MapleSim
- Visto: 9604

|
RETO Un proveedor líder de máquinas de envasado experimentaba repetidas fallas en el motor con sus robots manipuladores, que suponen costes sustanciales en el reemplazo de manera regular. SOLUCIÓN La compañía eligió a Maplesoft para desarrollar un modelo parametrizado de alta fidelidad del robot. Usando MapleSim, la compañía simuló la operación del robot y usó Maple para comprender la causa exacta del fracaso con la esperanza de encontrar una solución rentable. RESULTADO Los resultados de MapleSim mostraron a la compañía una solución que desconocían: en lugar de reemplazar los motores en cada robot, podían modificar los perfiles de movimiento del robot para reducir los momentos de mayor par motor. Básicamente, la compañía pudo aplicar una actualización de software a lo que anteriormente se esperaba que fueran costosos reemplazos de hardware en el sitio para motores más grandes. En el futuro, están utilizando sus modelos MapleSim para otros robots, minimizando los altos costes de los componentes diseñados en exceso y las reparaciones inesperadas en el lugar. |
La automatización industrial va en aumento, con máquinas que realizan cada vez tareas más complicadas. Diseñar estas complejas máquinas industriales es un gran desafío. Los ingenieros deben asegurarse de que la máquina que diseñan cumpla con muchos objetivos de rendimiento diferentes para la productividad, el espacio de trabajo, la maniobrabilidad, la carga útil, etc. Al mismo tiempo, también deben desarrollar un diseño que minimice los costes de producción y mantenimiento, como son el uso de motores lo más pequeños posible y los elementos más cortos para los brazos del robot, y la minimización de la carga para reducir el desgaste que lleva a costosas reparaciones, además del tiempo de inactividad. A la luz de tantas complejidades, las organizaciones posiblemente realizarán una ingeniería excesiva de sus productos, invirtiendo en componentes más costosos para reducir fallas imprevistas. Otros intentarán minimizar los costes, pero es más probable que se enfrenten a costosas reparaciones en el lugar cuando se producen fallas inesperadas. El modelado a nivel de sistema ofrece una tercera opción, que proporciona un análisis y visión profunda del rendimiento del producto mucho antes que los prototipos físicos.
Un proveedor líder de máquinas de envasado se acercó al equipo de Soluciones de Ingeniería de Maplesoft para comprender por qué experimentaban fallas recurrentes en los motores en los robots manipuladores desplegados en producción. Se dirigieron a Maplesoft para ayudarles a responder preguntas sobre el diseño de su producto, incluidas muchas preguntas que podrían ser beneficiosas para todos sus futuros diseños de robots:
- ¿Cuál es el tamaño correcto del motor para el robot en todas las condiciones de operación?
- ¿Qué longitud deben tener los elementos para lograr el espacio de trabajo deseado?
- ¿Qué efecto tendrán las diferentes combinaciones de longitudes de elementos en el diseño?
- ¿Cuál es el rendimiento requerido del motor y la caja de cambios en diferentes casos de uso?
El equipo de Soluciones de Ingeniería de Maplesoft aplicó un enfoque de modelado de sistemas paramétricos para responder a estas preguntas. Utilizaron MapleSim para desarrollar un modelo parametrizado de alta fidelidad de los robots manipuladores de la compañía. Luego utilizaron las capacidades de computación avanzadas de Maple para desarrollar herramientas de análisis para examinar el funcionamiento del sistema y su comportamiento dinámico con diferentes conjuntos de valores de parámetros. Estas herramientas de análisis, junto con el modelo de alta fidelidad, proporcionaron a la empresa la información necesaria para determinar cómo prevenir las fallas de sus motores sin ningún hardware adicional nuevo. Pudieron ajustar el perfil de movimiento del robot con el software actualizado, eliminando los momentos en que los motores experimentaban niveles de torsión dañinos. Lo que anteriormente había requerido reemplazos regulares de motores se redujo a una simple actualización de software, ahorrando a la compañía grandes cantidades de dinero en toda su línea de robots. Además de esto, Maplesoft les proporcionó un conjunto de herramientas que podrían configurar fácilmente para su uso en el diseño de productos similares.
Desarrollo de modelos utilizando MapleSim
En la Figura 1 se muestra un ejemplo de un robot típico de manipulación industrial. El modelo de robot está montado en una base de referencia, a la que se conectan tres elementos que forman el brazo del robot. Los elementos son accionados por tres servomotores, que proporcionan el movimiento de rotación y el control con tres grados de libertad. El terminal final consiste en un componente translacional adjunto al tercer elemento, que permite la acción deseada de coger y colocar.
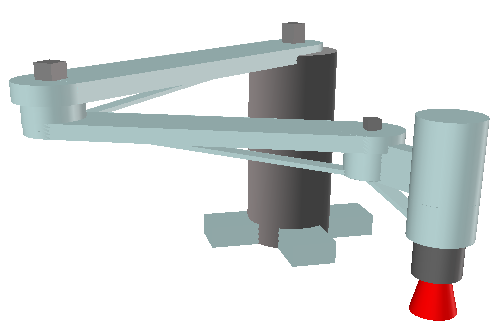
Figura 1: Diseño de un brazo robótico de 3 elementos en MapleSim
Cada una de las estructuras de los elementos incluye componentes de sensores para proporcionar información sobre la fuerza y el par, que luego se puede usar para determinar la fuerza radial, la fuerza axial y los momentos de flexión en cada cojinete. El modelo también incluye sondas integradas en ubicaciones estratégicas dentro del diseño para monitorear las características de rendimiento, como la velocidad y el par motor requeridos, junto con el ángulo y las restricciones de la junta.
Las simulaciones iniciales se corrieron en MapleSim para observar el comportamiento del sistema, con la información de la sonda presentada en varios gráficos. Luego se cargó el modelo en Maple para un análisis en profundidad.
Análisis de diseño utilizando Maple
El equipo de Soluciones de Ingeniería de Maplesoft creó un conjunto de herramientas de análisis en Maple para proporcionar a la empresa una visión profunda de su diseño, asegurando que su producto no estuviera sobredimensionado ni fuera propenso a fallas inesperadas. Aprovechando el modelo totalmente paramétrico de MapleSim y el motor de cálculo simbólico de Maple, las herramientas permitieron a la compañía realizar simulaciones en diversas condiciones operativas para determinar las mejores combinaciones de parámetros de diseño.
La primera herramienta de diseño desarrollada por Maplesoft permitió a la empresa realizar análisis cinemáticos. El análisis cinemático les permitió verificar el espacio de trabajo del robot, visualizar su movimiento y determinar las compensaciones de ruta requeridas. El movimiento del robot se ve afectado por si el codo del robot está configurado para estar en el lado derecho o en el lado izquierdo. Una de las características de la herramienta de análisis cinemático fue realizar los cálculos de cinemática inversa y evaluar las posiciones de ambos codos. Al observar su comportamiento en ambos casos, la compañía pudo tomar una decisión informada sobre en qué lado colocar el codo, una decisión que luego se llevó a cabo y se aplicó a todos los análisis posteriores.
El siguiente paso fue determinar si el robot estaba operando dentro del rango de movimiento permitido y si alguno de los ángulos de la junta excedía el límite deseado.

Figura 2: Análisis de la articulación en Maple.
Para cada articulación había múltiples variables, incluidos el ángulo de la articulación, la velocidad angular y la aceleración angular, y éstas variaban según la trayectoria deseada del movimiento del terminal final. Los resultados mostraron que la trayectoria inicial del diseño del terminal final dio lugar a grandes picos de aceleración angular, lo que indicaba que la empresa necesitaba realizar modificaciones para suavizar el movimiento utilizado para accionar las juntas. El ajuste no solo disminuiría la magnitud de los picos de aceleración, sino que también daría como resultado una menor carga conjunta y una reducción de los requisitos de funcionamiento del motor y del rodamiento. Esta información ayudó a evitar los costos innecesarios de los motores diseñados con exceso.
Si bien la compañía naturalmente quería usar los motores más pequeños posibles, también tenía que asegurarse de que los motores que seleccionaban aún cumplirían con los objetivos de rendimiento del robot. El equipo de Soluciones de Ingeniería de Maplesoft desarrolló una herramienta de análisis para ayudar a la compañía con el dimensionamiento del motor. La velocidad, el par y la energía de los motores se determinaron y graficaron, luego se superpusieron en las curvas de rendimiento del fabricante para los motores seleccionados. Las curvas de rendimiento del motor se seleccionaron de una lista de posibles datos del motor importados a Maple. Para cada uno de los motores, la compañía podría comparar los resultados simulados con datos de diferentes motores de las especificaciones del fabricante. Usando la herramienta de análisis, la compañía pudo considerar diferentes configuraciones de motor capaces de funcionar dentro del rango deseado.
Otra herramienta de análisis desarrollada por Maplesoft fue un barrido paramétrico para observar los efectos de diferentes longitudes de elementos en la operación del robot. La simulación del modelo con diferentes configuraciones de longitud de elementos dentro de un rango permisible predeterminado permitió a la compañía observar los efectos correspondientes en las características de rendimiento, como la velocidad del motor, el par, los requisitos de carga y las variaciones del espacio de trabajo. Maple hace uso automático del procesamiento paralelo, lo que permite que la computadora del usuario ejecute simultáneamente varias simulaciones utilizando diferentes valores de parámetros, y luego presenta los resultados superpuestos en una ventana de visualización para una comparación rápida y fácil.
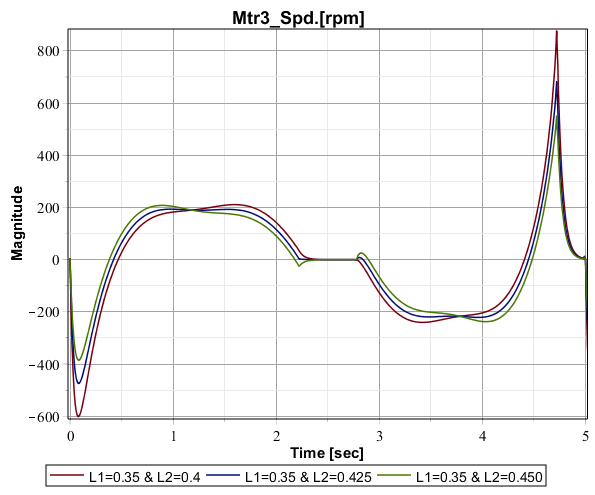
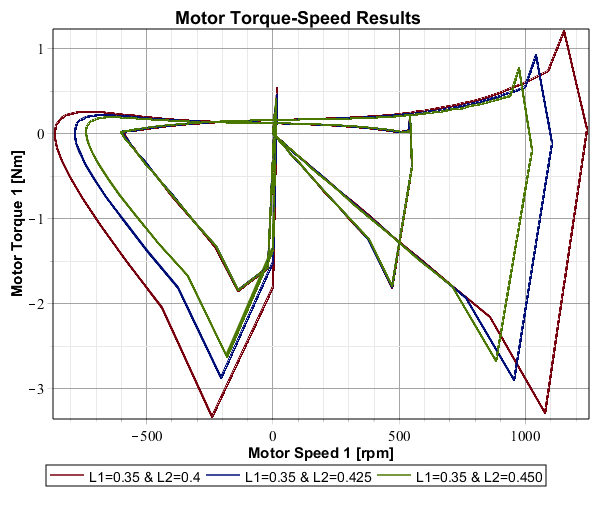
Figura 3: Ejemplo de resultados de barrido de parámetros para diferentes longitudes de enlace
Al adoptar un enfoque de modelado a nivel de sistema, la compañía pudo mejorar sus procesos de ingeniería, brindándoles una visión profunda del rendimiento de sus productos en una etapa temprana de diseño. La compañía aprovechó este nuevo proceso de diseño para eliminar un importante programa de reemplazo de motores, y continuó realizando mejoras de diseño para futuros ahorros de costos en toda su línea de robots.
Resumen
El equipo de Soluciones de Ingeniería de Maplesoft desarrolló una solución altamente configurable que ayudó a la compañía a enfrentar los desafíos y los costos inesperados que enfrentaron al diseñar robots industriales de manipulación. El desarrollo de un modelo de sistema totalmente paramétrico en MapleSim proporcionó acceso a todos los parámetros del sistema necesarios para analizar y optimizar el comportamiento del sistema. El motor de cálculo simbólico de Maple permitió el desarrollo de una gran cantidad de herramientas de análisis que exploraron las relaciones entre los parámetros del sistema y sus efectos en el rendimiento general. Este nuevo enfoque arrojó luz sobre soluciones que la compañía no sabía que existían, con costos generales tan solo de una pequeña fracción de sus técnicas anteriores para la reparación de motores de robots. Los modelos paramétricos también se están modificando y utilizando en varios diseños de robot de manipulación.
Este caso práctico presenta solo un ejemplo de innovación en los sectores de automatización industrial y maquinaria de envasado. A medida que los requisitos de robots automatizados se vuelven más complejos, esta empresa se dio cuenta del enorme papel que puede desempeñar el modelado a nivel de sistema para impulsar la innovación. Lo que comenzó como el deseo de solucionar un problema simple ha transformado radicalmente su proceso de diseño, acortando los ciclos de diseño y minimizando los costos innecesarios en cada paso del camino.
- Detalles
- Categoría: Comsol
- Visto: 5520
Con esta actualización todos los productos de software de COMSOL® experimentan mejoras de estabilidad. La siguiente lista enumera las mejoras más importantes en COMSOL® versión 5.4 update 1.
COMSOL Multiphysics®
- Solucionado un problema con un botón de radio que no respondía.
- Solucionado un problema en el instalador de COMSOL Server™ en versiones Windows® localizadas.
- Ajuste automático de la entrada del modelo de frecuencia para índices de refracción dependientes de la frecuencia o longitud de onda del rayo. Si previamente se había configurado la entrada del modelo manualmente, por ejemplo a
comp1.gop.f0, entonces, después de actualizar, hay que ir a Common Model Inputs, hacer clic con el botón derecho en Frequency (Hz) -minput.freq y escoger Reset to Default. - Se han realizado mejoras de estabilidad.
- Se han realizado mejoras de rendimiento.
Acoustics Module
- Correción de las variables de postprocesado globales generadas por la condición Port en modelos 2D axisimétricos.
- Solucionado un problema cuando se utilizaba únicamente una frecuencia en un estudio junto con la funcionalidad de Port Sweep.
CFD Module
- Correción de la densidad y viscosidad utilizadas para la condición de contorno Inlet en la interfaz Darcy's Law al utilizarla con el nodo de acoplamiento multifísico Multiphase Flow in Porous Media.
- Corrección de la implementación para el uso de múltiples nodos Mass Source en la interfaz Phase Transport.
COMSOL Compiler™
- El botón Executable y la correspondiente ventana Settings han sido renombradas a Compiler.
- Para compilar una aplicación se ha renombrado el botón Compile como Create Executable.
ECAD Import Module
- Las caras verticales ahora se incluyen en selecciones de red de contornos para capas de taladros en archivos ODB++.
Heat Transfer Module
- Solucionada la definición del coeficiente de compresibilidad isobárica cuando se utiliza la densidad definida por el usuario.
- Solucionado el soporte de malla móvil en las funcionalidades de cáscara.
- Habilita el acoplamiento multifísico Surface-to-Surface Radiation para las interfaces Slip Flow y High Mach Number Flow.
- Corregida la expresión para Zmean (figura de mérito media) en el acoplamiento multifísico Thermoelectric Effect.
- Solucionada la contribución de grosor fuera de plano a las funcionalidades de la interfaz de flujo de calor en geometrías 2D.
LiveLink™ for SOLIDWORKS®
- La interfaz LiveLink™ y el entorno de simulación de única ventana integrada ahora soporta SOLIDWORKS® 2019.
Nonlinear Structural Materials Module
- Correción de un error en el modelo Souza-Auricchio para aleaciones con memoria de forma.
- Corrección de un problema cuando se creaba una ley de deslizamiento definida por el usuario utilizando un Potential en el nodo Creep. En versiones anteriores, se aplicaba un factor de dos en los téminos fuera de la diagonal en la expresión de potencial para tener en cuenta la simetría en el tensor de tensión. Este factor se basaba en la asunción de que la expresión del potencial se escribió en términos de únicamente las partes superiores a la diagonal del tensor de tensión. Con esta actualización, el potencial se considera que está escrito en una forma estándar, de forma que las tasas de deformación de cizalladura se calculan directamente como la derivada del potencial respecto al elemento tensor de tensión correspondiente.
Particle Tracing Module
- Las funcionalidades de Heat Source, Convective Heat Losses, y Radiative Heat Losses para la interfaz Particle Tracing for Fluid Flow ahora respetan las selecciones de dominio.
Pipe Flow Module
- Las funcionalidades de Pipe Connection en modelos antiguos que uitlizan la interfaz Nonisothermal Pipe Flow tal cual, con un aviso de que la funcionalidad está obsoleta y que se eliminará en versiones futuras.
Ray Optics Module
- Salvaguarda adicional contra errores por divisiones por cero al utilizar la funcionalidad Ray Termination.
Semiconductor Module
- Corrección de la visualización de la ecuación de Poisson en la interfaz Semiconductor.
Structural Mechanics Module
- Corrección de un error que podía ocurrir al añadir Adhesion en una interfaz Solid Mechanics que todavía contenga el nodo Plasticity.
- Corrección de un error que podía ocurrir al utilizar Compact History en un modelo que contenga un acoplamiento multifísico Solid-Beam Connection.
Subsurface Flow Module
- Corrección en la definición de la formulación de la Permeabilidad y Kozeny-Carman para la ecuación de Richards para utilizar la permeabilidad relativa para calcular la transmisibilidad.
Linux es una marca registrada de Linus Torvalds en EE.UU y otros países. Microsoft, Excel, Internet Explorer, y Windows son marcas registradas o marcas de Microsoft Corporation en EEUU y/o otros países. macOS ies una marca de Apple Inc., en EEUU y otros países. MATLAB es una marca registrada de The MathWorks, Inc. SOLIDWORKS es una marca registrada de Dassault Systèmes SolidWorks Corp. El soporte para la implementación del Formato ODB++ Format fue proporcionado por Mentor Graphics Corporation en virtud de los Términos Generales y Condiciones de la Colaboración de Desarrollo de soluciones de ODB++ (http://www.odb-sa.com).
- Detalles
- Categoría: Comsol
- Visto: 8563
Dada la complejidad de los fenómenos que ocurren en la realidad, los científicos e ingenieros suelen dividir estos fenómenos en distintas áreas disciplinarias. Pero si uno quiere profundizar en el estudio de estos fenómenos no queda más remedio que traspasar esas áreas e intentar modelar la interacción entre más de una de ellas. Si hay algo que distingue a COMSOL Multiphysics® de otros programas de su entorno es su facilidad para poder modelar esas interacciones interdiciplinares. Lo que conocemos como interacciones multifísicas, y que dan nombre al propio software.
En esta entrada del blog de COMSOL, Amelia Halliday nos muestra la gran cantidad de acoplamientos multifísicos integrados en COMSOL Multiphysics y cómo éste incluso permite a los usuarios implementar sus propios acoplamientos de física. En COMSOL Multiphysics, hay tres enfoques de modelado diferentes:
- Completamente automático
- Manual con acoplamientos predefinidos
- Manual con acoplamientos definidos por el usuario
Cada enfoque es ventajoso para diferentes escenarios de modelado y varía en términos de facilidad de implementación y cantidad de ajuste manual requerido. El enfoque secuencial implica desarrollar de manera incremental el problema multifísico, el enfoque manual implica combinar la física en su modelo para el cual no hay acoplamientos o interfaces multifísicas disponibles, y el enfoque integrado es el que trata Amelia en esta publicación del blog, titulada "Definición de un modelo multifísico, parte 1: el enfoque integrado".
- Detalles
- Categoría: Minitab
- Visto: 9194
El otro día alguien me preguntó: “¿Cómo escribes tus blogs?"
“Es realmente sencillo," le contesté. "Solo aplico el teorema del mono infinito".
Según el teorema del mono infinito, si un número suficiente de monos escriben al azar en un teclado durante un tiempo suficientemente largo (infinito), será casi seguro que produzcan cualquier texto dado: como una obra de Shakespeare, la Constitución de los EEUU o la ayuda de Minitab.
Una premisa clave es el concepto de aleatoriedad. Los monos deben ser igualmente propensos a clicar cualquier tecla del teclado. Eso hace que la eventual escritura del Hamlet, o cualquier otra obra, sea teóricamente posible con un número suficiente de pruebas.
De hecho, un desarrollador de software puso a pureba este teorema el verano pasado simulando el tecleo aleatorio de "infinitos monos". Sus tropas virtuales de cibersimios generó más de 7 billones de grupos de caracteres aleatorios, y al hacerlo reprodujeron las obras completas de Shakespeare.
La aleatorización en la práctica: hombre vs mono
Por supuesto, a diferencia de los monos teóricos, los monos de verdad no clican aleatoriamente. Para probarlo, los investigadores de la Universidad de Plymouth colocaron un ordenador de escritorio en un recinto con seis macacos negros crestados. Los monos golpearon al ordenador con una piedra, hicieron caca y se orinaron sobre él, y escribieron la letra "S" una y otra vez.
No es exactamente el mejor ejemplo de aleatoriedad estadística.
Dejándolo solo a nuestros instintos naturales, los humanos solo lo hacemos un poco mejor al aleatorizar. Hace unos años, estaba asesorando a un investigador graduado que estaba analizando la calidad de unos huevos en un centro agrícola. Le pregunté "Se han seleccionado aleatoriamente los huevos del estudio?".
El investigador respondió "Sí". El seleccionó "cualquier huevo" de un carrito que contenía pilas de bandejas llenas de huevos , sin realmente pensar en ello.
Uff. Aquí es donde nuestro concepto cotidiano e intuitivo de la palabra "aleatorio" nos lleva por mal camino. El significado cotidiano de "aleatorio" está realmente más cerca de "al azar" o "de cualquier manera". Le falta la definición rigurosamente estadística de "equiprobabilidad".
Si se toman huevos de las bandejas apiladas en un carrito, ¿cada huevo tiene la misma probabilidad de ser cogido? Probablemente no. La proximidad de los huevos, la posición de la bandeja en el carrito, su color, su forma o condición podrían influenciar (consciente o inconscientemente) su selección.
Entonces, ¿por qué los estadísticos son tan quisquillosos respecto a la aleatoriedad? Si una muestra es propensa a un sesgo selectivo, entonces los resultados de su análisis se aplicarán solo a una muestra, no a la población más grande de la que proviene la muestra. No será posible extrapolar mucho de esos resultados.
La aleatorización en la práctica: Minitab vs hombre
Los datos aleatorios, entonces, en el sentido estadístico estricto, no se recopilan al azar, en el sentido cotidiano. Eso requiere un poco de previsión y planificación.
Como aleatorizador, Minitab Statistical Software supera a los monos y a los humanos sin lugar a dudas.
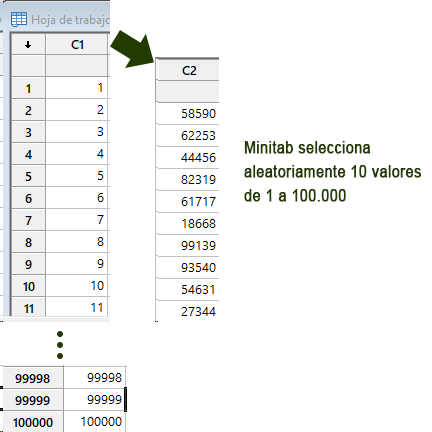
Supongamos que deseamos tomar una simple muestra aleatoria de 10 artículos de un grupo de 100.000 artículos. Entramos los valores de 1 a 100.000 en la hoja de trabajo de Minitab, en la columna C1, para representar cada elemento. (Consejo: a menos que se desee sentirse cmo un mono escribiendo hasta el infinito, para hacer esto utilice Calc > Crear patrones de datos > Conjunto simple de números)
A continuación, elija Calc > Datos aleatorios > Muestreo por columnas e indique el número de filas (elementos) desea muestrear, en este caso 10.
Aquí está la muestra que se obtuvo: por supuesto, cada una será diferente.
Ahora, quizás piense que podría haber escogido 10 valores aleatoriamente por Vd. mismo. Créame, no puede. Si no me cree tómese un minuto para ver este video de unos inteligentes niños.
Nota del autor: Algunos matemáticos cuestionan el teorema del mono infinito, argumentando que, para todos los propósitos prácticos, la probabilidad de recrear con éxito cualquier trabajo dado al teclear al azar es realmente nula, basándose en la ley de los grandes números.
Pero no estody de acuerdo. Ayer puse un mono junto a un teclado. En su primer intento, el mono cró al azar una versión más clara e inteligente del código fiscal federal de los EEUU. En su segundo intento, consiguió Finnegan's Wake. Y en su tercer intento, consiguió este blllooooooggg ssssssssssssssssssssss$&%&^%
- Detalles
- Categoría: Signals Notebook
- Visto: 35490
Esta última versión de Signals Notebook pretende, en gran medida, facilitar la búsqueda y filtrado dentro de cuadernos y experimentos.
Búsqueda y actualizaciones de carpetas inteligentes
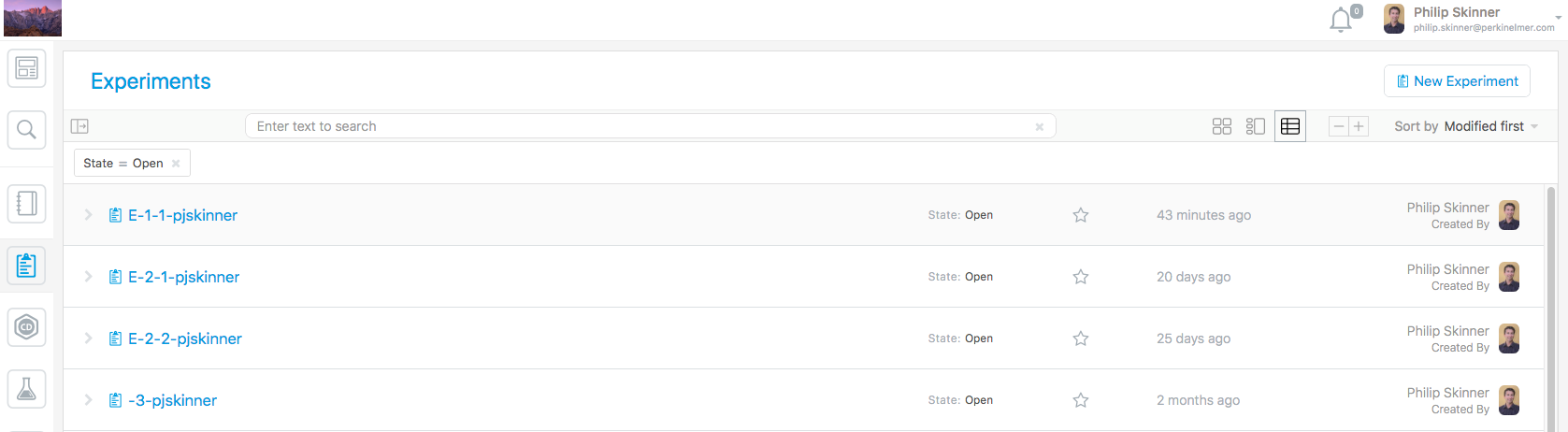
Los cuadernos, experimentos, reacciones y compuestos químicos se han actualizado para ser coherentes con los cambios recientes en la interfaz de búsqueda. Cualquier filtro que aparezca en las carpetas puede ser clicado para ampliar la información.
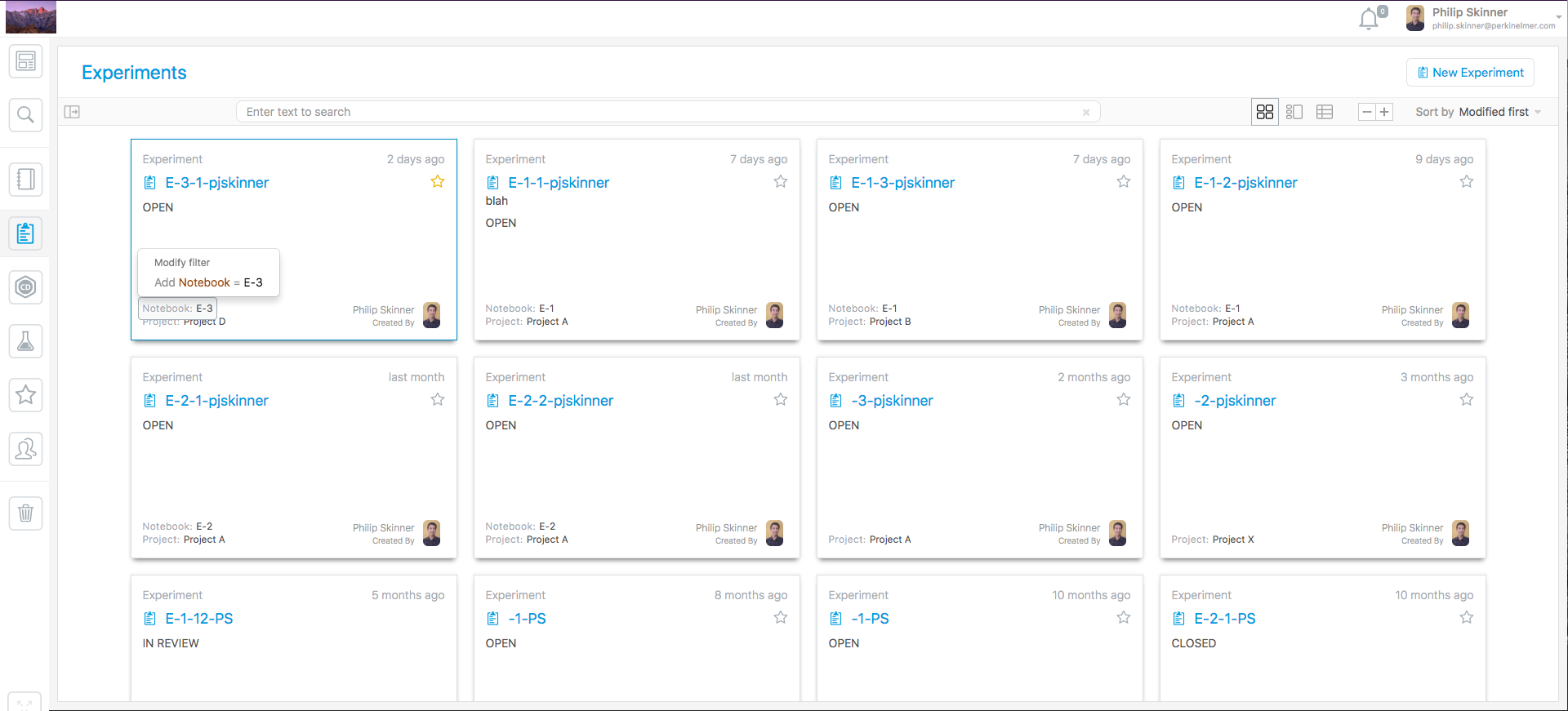
Los demás filtros se encuentran accesibles en el panel de la izquierda.
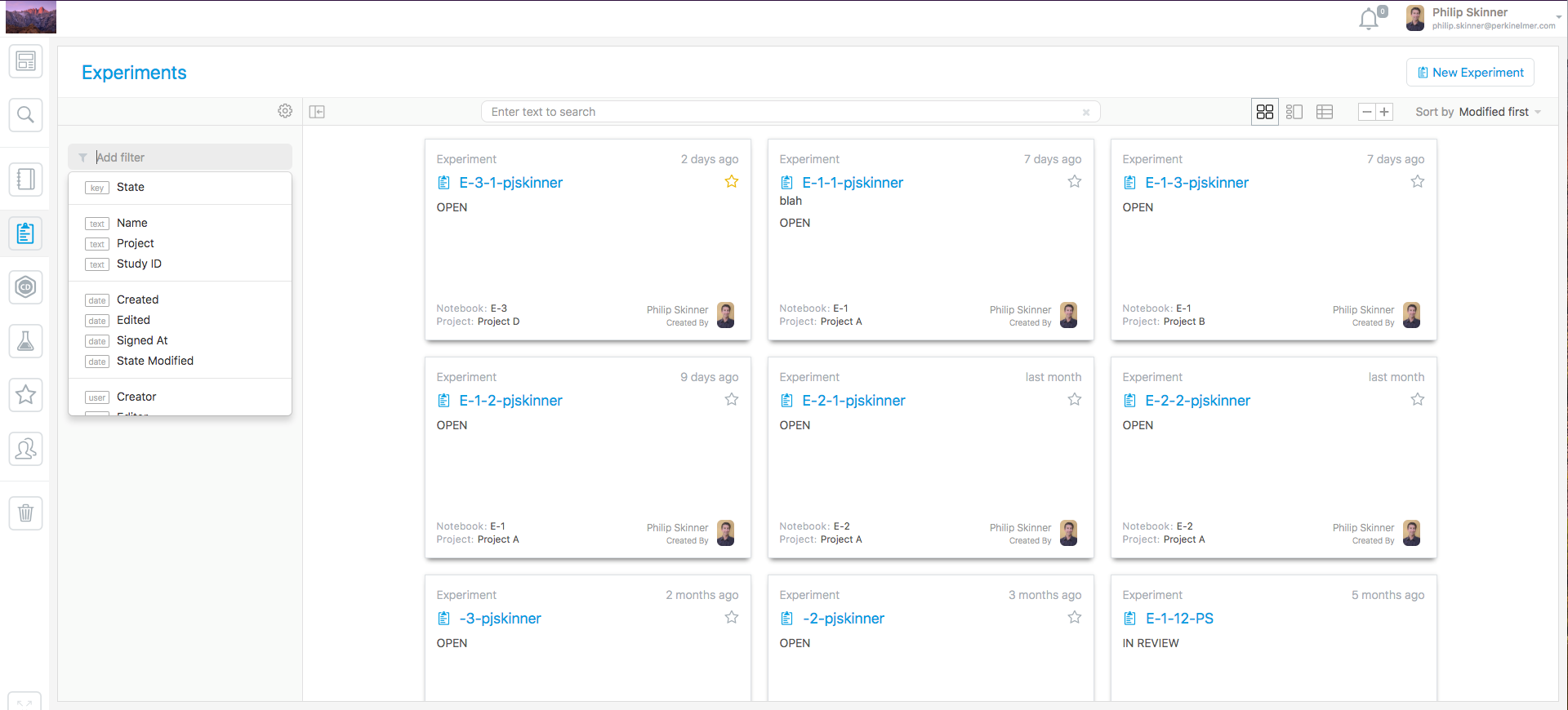
Se han incluido clasificaciones adicionales, filtros y opciones de visualización para facilitar y potenciar la herramienta de búsqueda. Las clasificaciones pueden ordenarse por nombre, creación o fecha de modificación, en orden creciente o decreciente.
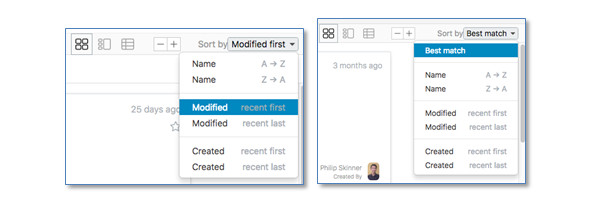
Los resultados pueden visualizarse en formato lista además de la visualización en tarjetas.
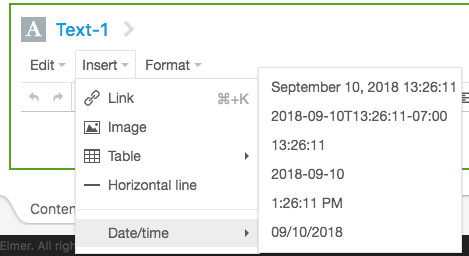
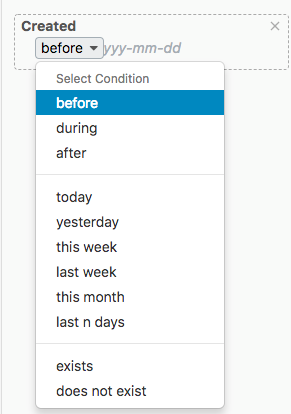
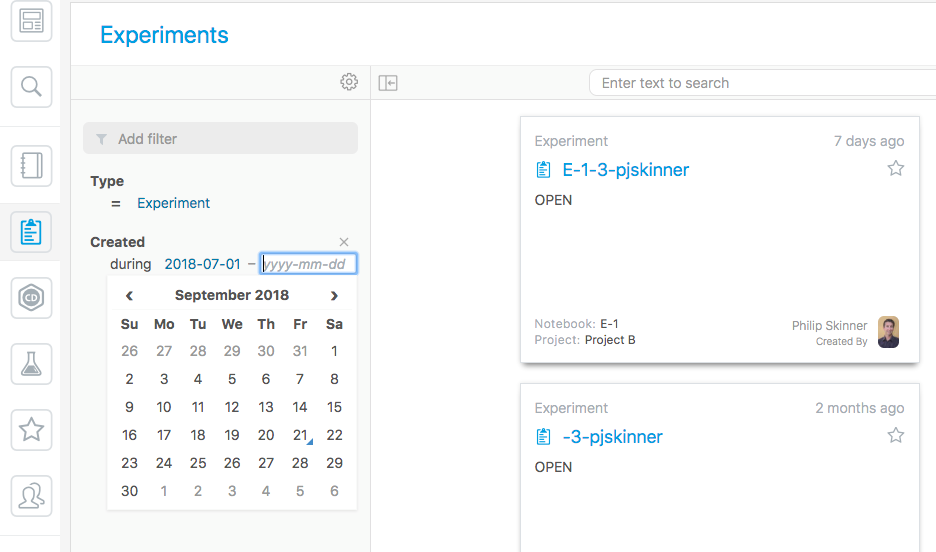
Otra novedad son las búsquedas por fecha. Combinando una de las condiciones “antes”, “durante” y “después” con la selección de una fecha concreta en el calendario, se reducen notablemente los resultados que el cuaderno nos ofrece.
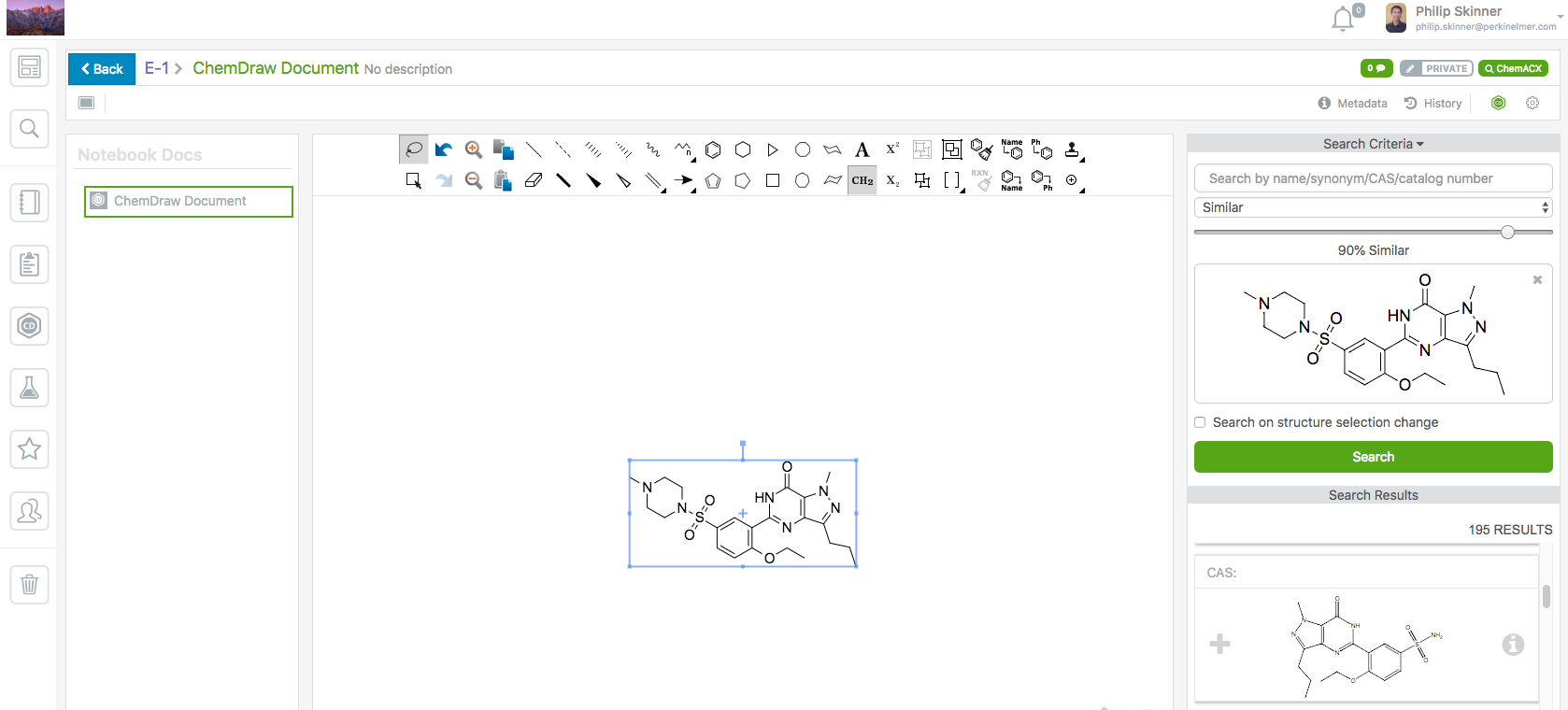
Explorador ChemACX
ChemACX ahora está disponible en los documentos de dibujo químico para documentos agregados desde ChemDraw y para aquellas estructuras que se dibujan directamente en el cuaderno.
Fecha y hora en elementos de texto
Con el propósito de eliminar la ambigüedad en la asignación de días del mes, se han agregado marcas de fecha/hora adicionales. En particular, figura una marca de fecha/hora consistente con ISO 8601 relativa a UTC.