- Detalles
- Categoría: Maple T.A.
- Visto: 5843
GENERAL
¿Es Maple T.A. lo mismo que Maple?
-No. Maple T.A. es un programa de la misma compañía que Maple. El motor de cálculo que utiliza Maple T.A. para procesar sus algoritmos en la creación de preguntas y gráficos es Maple. Maple es una herramienta matemática estándar para el cálculo analítico que permite realizar algebra simbólica, cálculo numérico, resolver ecuaciones diferenciales, gráficos y animaciones.
¿Es necesario tener algún programa instalado para utilizar Maple T.A.?
-No, no es necesario tener ningún programa externo instalado sólo tener actualizado el navegador web y tener habilitado JavaScript. Maple T.A. puede incluso utilizarse en smartphones y tablets.
SISTEMA Y ADMINISTRACIÓN
¿Se puede sincronizar Maple T.A. con mi plataforma de administración de cursos (Moodle, Blackboard, ...)?
-Sí, Maple T.A. se puede sincronizar con todo tipo de plataformas que soporten conexión LTI. No es necesario crear nuevos usuarios en Maple T.A. y todas las calificaciones automáticamente son enviadas al sistema que se esté usando.
¿Puede usarse LaTeX en Maple T.A.?
-Sí, y también MathML.
¿Se queda registrado en el sistema la tarea que realiza el estudiante?
-Sí, Maple T.A. guarda en su apartado de calificaciones qué es lo que respondió el estudiante y qué enunciado tenía.
PROFESORADO
¿Qué tipos de preguntas se pueden crear en Maple T.A.?
-Se pueden crear preguntas utilizando el lenguaje de Maple, HTML, JavaScript, de múltiple opción, seleccionar de una lista una oración, ordenar una serie de artículos, diagrama de cuerpo libre. También hacer que la respuesta sea pulsar en una región de una imagen, o graficar una función.
¿Se puede crear una pregunta con valores aleatorios en Maple T.A.?
-Sí, gracias al uso del motor Maple.
¿Se pueden etiquetar las preguntas por temas?
-Sí, se puede hacer desde el menú de repositorio de contenido de Maple T.A.
¿Se puede crear feedback personalizado en función de la nota que obtenga el estudiante?
-Sí, Maple T.A. da libertad a programar feedback personalizado e incluso un sistema de ayuda mientras el alumno resuelve las tareas.
¿Cómo funcionan las tareas tipo examen?
-Las tareas de tipo examen son muy parecidas a una tarea normal, la única diferencia es que se realizan a pantalla completa y en caso que el estudiante minimice la ventana o cambie a otra ventana se cerrará automáticamente la tarea y se requerirá que el profesor vuelva a darle permiso para que continúe.
ALUMNOS
¿Qué pasa si se pierde la conexión mientras se realizaba una tarea?
-Todos los datos serán borrados a menos que se haya pulsado el botón Guardar y salir. Se recomienda ir guardando frecuentemente si se realiza la tarea desde algún sitio con mala cobertura.
¿Se pueden ver las respuestas correctas?
-Dependiendo de las políticas que el profesor haya aplicado para la tarea o examen se pueden ver las respuestas correctas mientras se realiza la tarea o después de su realización.
¿Debe de ser mi respuesta exactamente igual que la que tiene guardada Maple T.A.?
-No necesariamente, Maple T.A. incorpora la herramienta Maple la cual puede interpretar el resultado del alumno y compararlo con la respuesta correcta interna. Es decir, si la respuesta es x2 y el alumno escribe x·x será válida su respuesta. A menos que el profesor indique que sólo la respuesta de Maple T.A. es la correcta.
¿Qué significa cambiar el estilo de entrada?
-Maple T.A. tiene dos métodos básicos de entrada de expresiones matemáticas, modo texto y modo simbólico. El modo texto es muy similar al utilizado por calculadoras. El modo simbólico hace uso de la paleta de Maple para poder escribir las expresiones matemáticas de igual forma que se escribirían a mano.
¿Maple T.A. dice que mi expresión es incorrecta. Qué puedo hacer?
-Maple T.A. analiza las expresiones matemáticas que el alumno escribe, por lo que estas deben de estar bien escritas para su correcta interpretación. Generalmente el error más común que se comete es olvidarse de cerrar un paréntesis. En cualquier caso, se aconseja trabajar con el modo simbólico para evitar errores de escritura en las expresiones.
- Detalles
- Categoría: Comsol
- Visto: 4319
Ayude a su negocio a estar al día. Esta guía para la dirección deberá proporcionarle información sobre cómo las apps de simulación pueden potenciar a toda la organización con modelado multifísico y funcionalidades de diseño punteras. Añadiendo apps de simulación al flujo de trabajo de diseño de producto, para su uso en todos los departamentos, proporciona enormes beneficios como innovación con riesgos reducidos y reducción de tiempo de comercialización.
Potencie su negocio. Lea esta guía para:
- Aprender sobre el software COMSOL Multiphysics® y COMSOL Server™, incluyendo cómo las apps de simulación pueden mejorar su flujo de trabajo con ejemplos de Wolfspeed y Cypress Semiconductor
- Benefíciese de la experiencia de usuarios de COMSOL Multiphysics en Boeing, Toyota, Sharp, Miele, y Fiat
- Obtenga más información en los recursos disponibles de COMSOL
- Detalles
- Categoría: Minitab
- Visto: 6225

La última adquisición añade lo mejor en herramientas de análisis predictivo a la gama de productos y servicios basados en datos de Minitab.
Minitab, Inc., que proporciona software de mejora de calidad a más de 90% de las compañías Fortune 100, ha anunciado hoy que ha adquirido Salford Systems, un proveedor líder de tecnología de análisis avanzado para aprendizaje automático, minería de datos y análisis predictivo.
Para Minitab, la adquisición extiende la misión de la compañía de 45 años de edad de ayudar a las personas a descubrir información valiosa en sus datos proporcionando software excepcional y fácil de usar y un soporte y servicio sin igual. La integración de Salford en el negocio de Minitab beneficiará a los usuarios actuales de productos de ambas compañías y llevará potentes capacidades analíticas a nuevos mercados.
La compra expandirá inmediatamente la distribución del SPM Salford Predictive Modeler® de la empresa, una plataforma de modelado desarrollada y mejorada en colaboración directa con los creadores originales del moderno aprendizaje automático y la minería de datos. La compra también proporciona recursos para permitir a Salford para proporcionar más rápidamente innovaciones con potenciales aplicaciones en todas las funciones importantes de la industria y los negocios, como en servicios financieros, productos farmacéuticos, el comercio minorista, la publicidad, la tecnología, las telecomunicaciones, el transporte, el sector hotelero, el gobierno y la industria.
"Los productos y servicios de Salford nos permiten ofrecer soluciones extremadamente potentes de minería de datos que son fáciles de implementar con soluciones empresariales existentes, fáciles de usar, y demostrar continuamente el retorno a las organizaciones de cualquier tamaño," dice Charles Snellgrove, presidente de Minitab. "A través de nuestra red global existente, las organizaciones de todo el mundo tendrán ahora un acceso fácil a la mejor solución actual a sus problemas de modelado predictivo."
La facilidad de uso y amplia gama de aplicaciones de los productos de Salford son dos de las razones principales por las que la compañía era tan atractiva para Minitab. Inspirados por la manera en que los científicos de datos más importantes enfocan su trabajo, Salford Predictive Modeler dispone de automatización integrada que beneficia tanto a los expertos como a lo modeladores con menos experiencia. Mientras que el analista mantiene el control total, el software anticipa los siguientes mejores pasos, lo que permite a los modeladores emplear más tiempo en pensar en los problemas que están tratando de resolver, para reconocer los posibles problemas que podrían limitar su progreso o la aplicabilidad de sus modelos, y para obtener resultados mucho más rápido.
La eficacia de la tecnología de Salford Systems pudo verse últimamente en la Direct Marketing Association (DMA) Analytics Challenge. Utilizando datos del mundo real de organizaciones como la Fundación Make-A-Wish Foundation y la Clínica de Cleveland, esta competición anual se centra en una amplia gama de desafíos de negocios, tales como campañas de marketing, que predicen el tiempo de vida del cliente, y hacer frente a los retos de adquisición de clientes prescritos. La empresa que ha ganado más premios analíticos DMA –DataLab USA- utilizó Salford Predictive Modeler para hacerlo.
"El software de Salford nos permite construir mejores modelos en una fracción del tiempo," dice Aaron Davis, jefe de los servicios de análisis en EE.UU. de DataLab. "Esto permite a nuestro equipo concentrarse en otras áreas del problema de la empresa, que en última instancia conduce a soluciones más exitosas."
El software SPM Salford Predictive Modeler®, que incluye los métodos de modelado esenciales Cart® Decision Trees, Random Forests®, TreeNet® Gradient Boosting y la regresión no lineal MARS®, es muy preciso, ultra-rápido y se puede utilizar con conjuntos de datos estructurados o no estructurados. Aunque el software de Salford ya es un componente crítico de los programas de análisis de modelos de predicción en muchas de las mayores compañías del mundo, se espera que la adquisición de Minitab acelere el alcance para ayudar a más organizaciones a beneficiarse de su uso.
"Salford Predictive Modeler es una herramienta clave en todos los proyectos de modelado gestionados por mi equipo", dice Bill Kahn, director de modelado de comportamiento de los consumidores de Bank of America. "Proporciona una potencia predictiva superior, seguridad por defecto, opciones de gran alcance, fiabilidad y velocidad de cálculo. Las interfaces de comandos y gráficas de usuario, la documentación y el soporte son excelentes. La combinación de Minitab y Salford permitirá inversiones más profundos en la herramienta, lo que llevará a la liberación más rápida de nuevas capacidades.
- Detalles
- Categoría: MapleSim
- Visto: 6109

Problema
Idealmente, un modelo de neumático tiene que simular con precisión la dinámica del sistema y proporcionar simulaciones que se ejecuten con rapidez. Desgraciadamente, los modelos de neumáticos existentes normalmente o no son capaces de modelar el comportamiento con un alto grado de precisión o necesitan muchos recursos y son lentos en la simulación. Los investigadores en la Universidad de Waterloo querían ver si podrían desarrollar un nuevo modelo de neumático que proporcionara un mejor balance entre precisión y eficiencia.
Solución
Utilizando MapleSim, los investigadores desarrollaron un modelo de neumático volumétrico con la intención de proporcionar resultados precisos de forma más eficiente que otros modelos.
Resultado
Los resultados de las pruebas iniciales son prometedores. El nuevo modelo de neumático presenta una precisión mejorada respecto otros modelos existentes sin recurrir a enfoques con altos costes en recursos. El plan de los investigadores es utilizar datos adicionales de un Sistema de Medidas de Vehículos para poder sintonizar más fino los parámetros del modelo en MapleSim. El modelo de neumático puede entonces ser incorporado en modelos de vehículos detallados para simulaciones de sistemas de vehículo completos.
Los neumáticos son un componente crítico en el diseño de vehículos. Para ahorrar tiempo y dinero en el diseño y desarrollo de nuevos vehículos, los fabricantes de automóviles normalmente utilizan modelos para simular las relaciones dinámicas entre neumáticos y superficies de terrenos. Idealmente, un modelo de neumático debe de simular con precisión la dinámica del sistema y permitir a los diseñadores variar sus parámetros, y las simulaciones también deben de correr rápidas.
Los modelos de neumáticos existentes tienen desventajas inherentes. Algunos de estos modelos de neumáticos existentes, como el modelo de neumático con fórmula mágica Pacejka, están basados únicamente en datos experimentales. De forma alternativa, como en los modelos de elementos finitos, requieren Alternatives, such as finite element models, requieren una gran cantidad de recursos, mientras otros modelos de neumáticos representan al neumático con un objeto físico, como una cadena o un cepillo. Ninguno de estos modelos alcanza un balance ideal de precisión y eficiencia. Sin embargo, los investigadores de la Universidad de Waterloo están tomando un nuevo enfoque de modelado de neumáticos con el objetivo final de alcanzar este balance ideal.
El grupo de investigación, liderado por el Dr. John McPhee, catedrático de Ingeniería de Diseño de Sistemas, y el Dr. Joydeep Banerjee, investigador jefe, utilizó la herramienta de modelado a nivel de sistemas de Maplesoft, MapleSim, para desarrollar y verificar un modelo de neumático volumétrico. "El modelo de neumático desarrollado en MapleSim ofrece dos ventajas diferentes sobre los modelos de neumáticos existentes," dijo el Dr. Banerjee. "Como los momentos se calculan utilizando únicamente datos cinemáticos, el modelo puede programarse fácilmente para simulaciones numéricas. Además, las torsiones resistivas se calculan como funciones tanto de la carga normal como de la velocidad angular de la rueda."
Utilizando Maple, el motor de cálculo avanzado de Maplesoft, las expresiones simbólicas para la fuerza normal y la resistencia de rodadura se derivaron como una función de la posición y la orientación del neumático. Las fuerzas de fricción distribuidas se integraron simbólicamente sobre la zona de contacto del neumático para calcular las fuerzas de tracción y momentos de auto-alineamiento. Los investigadores utilizaron entonces MapleSim para desarrollar el modelo utilizando componentes personalizados derivados de las expresiones de Maple. El modelo de neumático volumétrico resultante se muestra en la Figura 1.
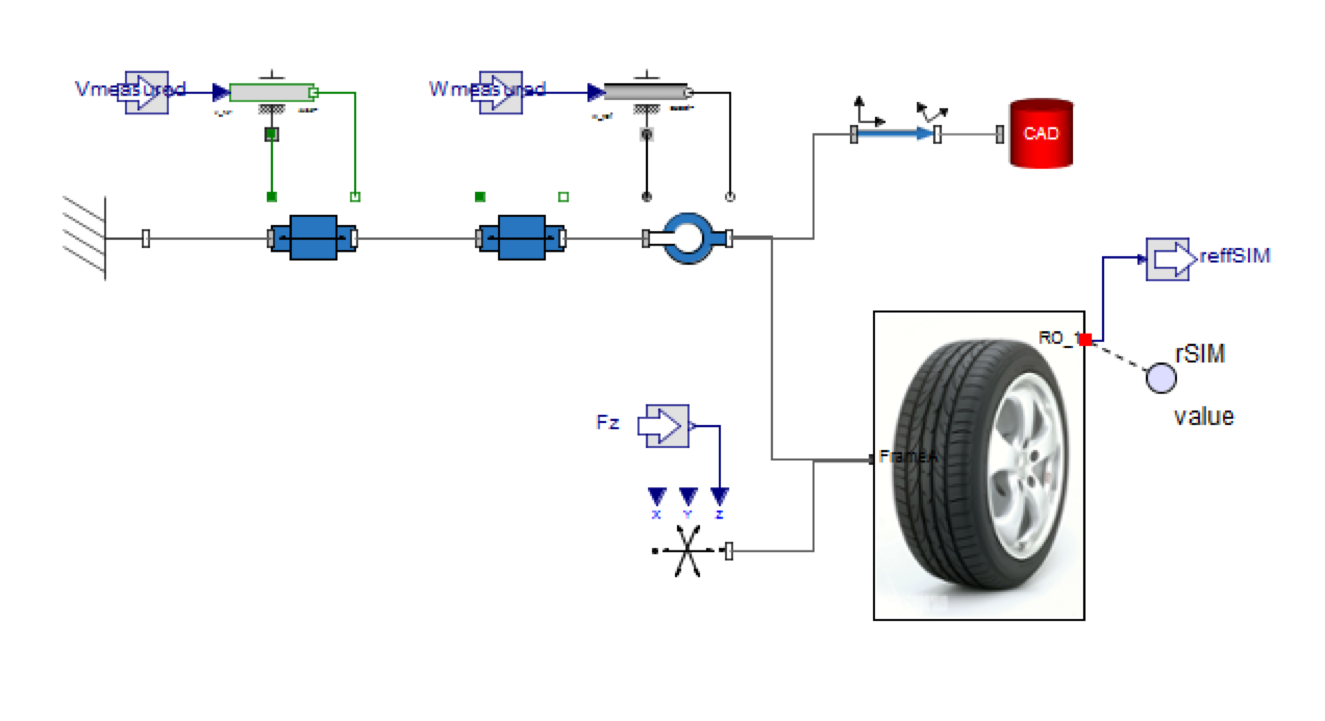
Figura 1 - Modelo de neumático volumétrico desarrollado en MapleSim
Para verificar la precisión del modelo de neumático volumétrico, se utilizó el modelo en una prueba de caída simulada. Se realizó una prueba de caída real con un neumático de verano MICHELIN® 195/65 R15 inflado a 33 psi. El modelo de neumático se montó para que recibiera el mismo movimiento que el test de caída real. Utilizando MapleSim, se simuló la caída y rebote del neumático. También se utilizó otro modelo de neumático disponible comercialmente, seleccionado de la amplia Librería de Neumáticos de MapleSim, para comparar los resultados. En la Figura 2 se muestra una comparación de las fuerzas simuladas y medidas. Al comparar los resultados de los dos modelos, el modelo de neumático volumétrico de MapleSim proporciona una estimación ligeramente más precisa para la posición de la rueda.
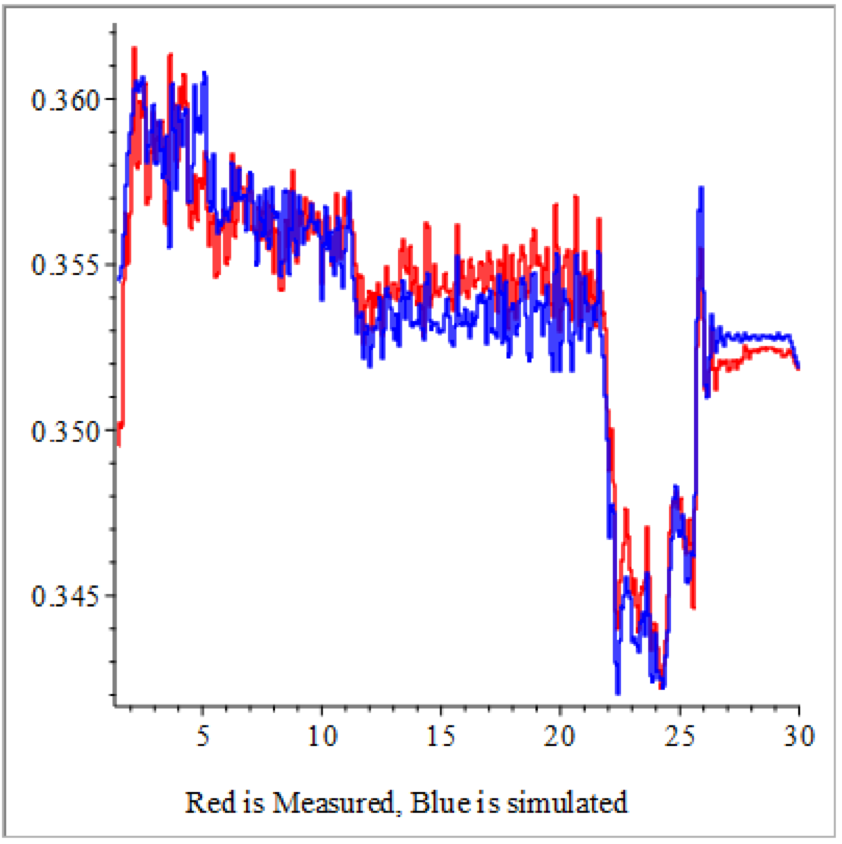
Figura 2 - Comparación de las fuerzas simuladaas y medidas en el modelo de neumático volumétrico
Los resultados iniciales indican que el modelo de neumático volumétrico de MapleSim es prometedor, para su uso no solo para neumáticos de automóviles, sino que también para ángulos de inclinación más altos, como en neumáticos de bicicletas y motos. Para aumentar la fidelidad del modelo, los investigadores planean realizar más pruebas del modelo de neumático volumétrico utilizando datos obtenidos con un Vehicle Measurement System (VMS). El VMS, mostrado en la Figura 3, proporcionará información sobre la posición, orientación y cargas sobre el neumático durante pruebas de conducción reales de un vehículo.

Figure 3 - Vehículo instrumentado con VMS
"Como que los resultados iniciales del modelo parecen prometedores, los datos obtenidos con el VMS podrán utilizarse para sintonizar mejor los parámetros del modelo de neumático," dijo el Dr. McPhee. "Utilizando MapleSim, podemos realizar más análisis incorporando fácilmente el modelo de neumático en modelos de vehículos detallados para realizar simulaciones de sistemas de vehículos completos."
*En el momento de la realización de este estudio de investigación, el Dr. Joydeep Banerjee era miembro de el equipo de investigación del Dr. McPhee en la Universidad de Waterloo. Actualmente está empleado en Maplesoft como ingeniero de aplicaciones.
- Detalles
- Categoría: Minitab
- Visto: 32362
Por Bruno Scibilia (Traducido del blog de Minitab)
Estamos en una era de datos masivos. Se está generando una gran cantidad de datos de la web y de registros de relaciones de clientes, sin mencionar también los procedentes de los sensores utilizados en la industria productiva (empresas de semiconductores, farmacéuticas, petroquímicas y muchas otras industrias).
Gráficos de control univariable
En la industria manufacturera las características críticas de los productos son recogidos rutinariamente para asegurar que todos los productos en cada paso del proceso se mantienen dentro de las especificaciones. Los gráficos de control univariable dedicados se utilizan para asegurar que cualquier deriva es detectada cuanto antes para evitar efectos negativos en el rendimiento del producto final. De forma ideal, cuando se identifica una causa especial, la maquinaria debería de ser parada inmediatamente hasta que se resuelva el problema.
Monitorización de los parámetros del proceso de las herramientas
En las plantas modernas, muchas herramientas de producción se conectan a redes IT de forma que los parámetros del proceso de esa herramienta pueden registrarse y almacenarse en tiempo real (presiones, temperaturas, etc.) Desgraciadamente, este tipo de datos, muy a menudo no se monitorizan continuamente, aunque se puede esperar que esos parámetros del proceso jueguen un importante papel en términos de la calidad final del producto. Cuando ocurre un incidente de calidad, a menudo se recuperan los datos de esos numerosos parámetros del proceso de la base de datos para investigar (después del hecho) por qué tuvo lugar ese incidente.
Una aproximación más eficiente sería monitorizar esos parámetros del proceso en tiempo real e intentar comprender cómo afectan a los complejos procesos de fabricación: ¿Qué parámetros del proceso son realmente importantes y cuáles no? ¿Cuáles son sus valores de mejor ajuste?
Gráficos de control multivariable
Sin embargo, monitorizar los parámetros de las herramientas a medida que se avanza en el proceso podría llevar a un inmenso incremento en el número de gráficos de control. En este contexto, los ingenieros de procesos podrían beneficiarse del uso de gráficos multivariable que permiten monitorizar hasta 7 u 8 parámetros juntos en un único gráfico. En vez de utilizar datos de parámetros de los procesos de los equipos para investigar las causas de incidentes previos de calidad en un modo de equipos de intervención, esta aproximación se centraría en mejoras de largo término.
Los gráficos de control multivariable se basan en distancias cuadráticas multivariables estandarizadas (generalizadas) de la media general. En Minitab, el método T² Hotelling se utilize para generar gráficos multivariable. Si todavía no dispone de Minitab y desea probar de crear algunos de estos gráficos sobre los que estamos hablando, puede descargar la versión de evaluación de 30 días.
Una ventaja obvia de utilizar gráficos multivariable es que permiten minimizar el número total de gráficos de control que se necesitan gestionar, pero existen también otras ventajas relacionadas adicionales involucradas:
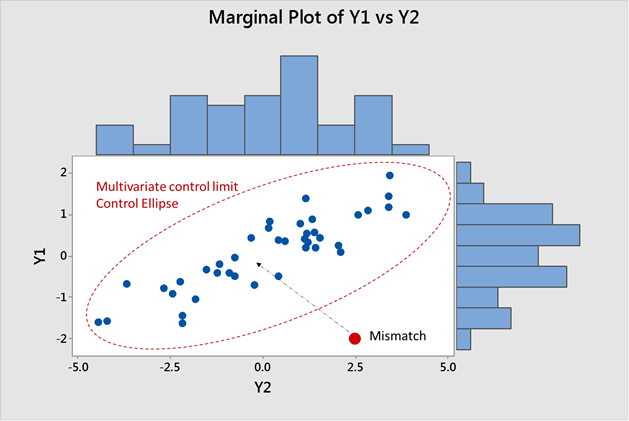
- Analizar conjuntamente parámetros del proceso: Muchos parámetros del proceso están relacionados con otros, por ejemplo, para un paso particular del proceso podríamos esperar que el valor de la presión sea grande cuando la temperatura es alta. Considerar cada parámetro del proceso por separado no tiene por qué ser una buena opción e incluso podría ser engañoso. Detectar cualquier desajuste entre los ajustes de los parámetros puede ser de gran utilidad.
En el gráfico inferior, los valores de los parámetros Y1 y Y2 están correlados (altos valores de Y1 están asociados con altos valores para Y2) así que el punto rojo en la esquina inferior derecha parece estar fuera de control (fuera de la elipse de control) desde un punto de vista multivariable. Sin embargo, desde una perspectiva univariable, este punto rojo permanece dentro de los márgenes de fluctuación usuales tanto para Y1 como Y2. Este punto claramente representa un desajuste entre Y1 y Y2. La distancia cuadrática multivariable generalizada del punto rojo a la media de la nube de puntos es inusitadamente grande.
- Tasa global de falsas alarmas: La probabilidad de una falsa alarma con límites estándar tres-sigma en un gráfico de control es 0,27%. Si se monitorizan 100 gráficos al mismo tiempo, la probabilidad de una falsa alarma automáticamente aumenta al 27% (0.27% * 100).
Sin embargo, cuando se monitorizan simultáneamente numerosas variables utilizando un gráfico multivariable, la tasa global/familiar de falsas alarmas permanece cercana al 0.27%. - Medidas 3-D: Cuando se toman medidas tridimensionales de un product, la cantidad de datos necesarios para asegurar que todas las dimensiones (X, Y y Z) permanecen dentro de las especificaciones puede ser realmente grande. Pero si el producto queda dañado en una zona particular, esto normalmente afecta a más de una dimension, por lo que las tres dimensiones no deberían de considerarse por separado. Si un gráfico multivariable monitoriza simultáneamente las desviaciones de los valores X, Y, Z planeadas, serán tenidos en cuenta sus efectos combinados.
Un sencillo ejemplo
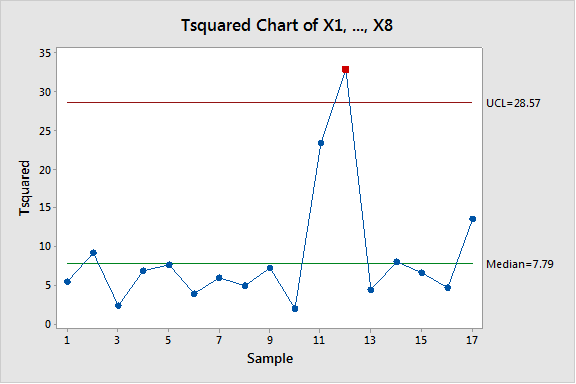
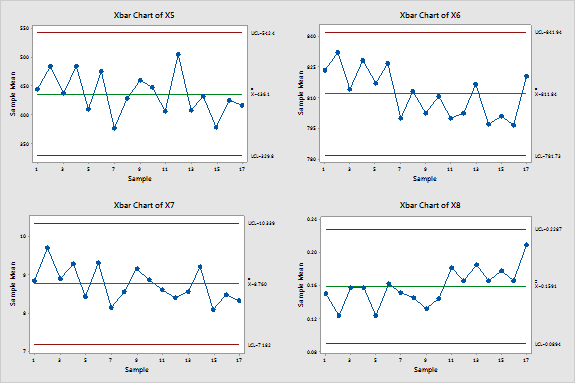
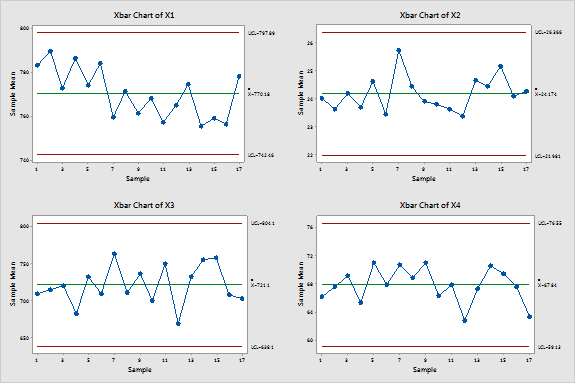
Se han monitorizado ocho parámetros del proceso utilizando ocho gráficos de control Xbar univariable. No se ha detectado ningún punto fuera de control (ver debajo):
Los ocho gráficos de control anteriores pueden reemplazarse por un único gráfico multivariable que monitorice las ocho variables simultáneamente. Aunque no se detectó ningún punto fuera de control en los gráficos univariable, el subgrupo número 12 resulta estar fuera de control en el gráfico multivariable:
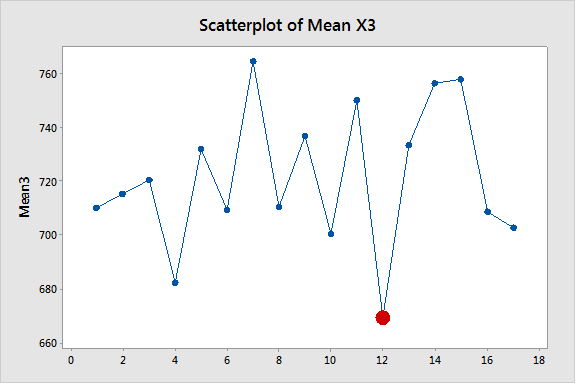
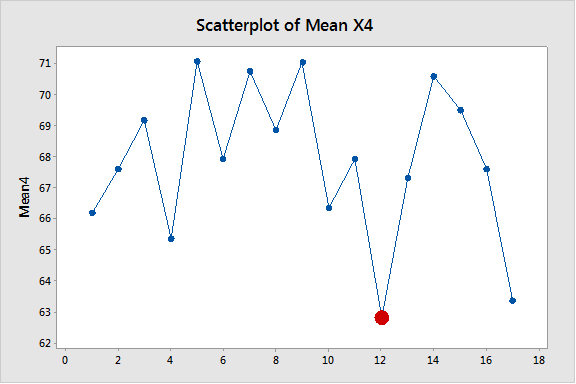
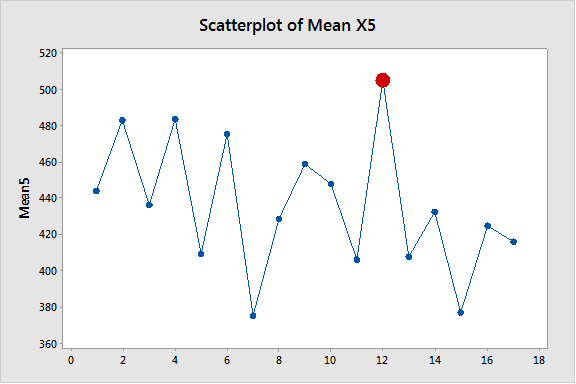
Para investigar por qué ocurrió un punto fuera de control (subgrupo 12) en el gráfico multivariable, utilizamos unos sencillos gráficos (gráficos de dispersión) para analizar las tendencias temporales. Nótese que en lo que respecta a donde están involucrados los parámetros X3, X4 y X5, el subgrupo 12 está posicionado lejos de los otros puntos.
Conclusión
Cuando los parámetros del proceso no tienen un efecto crítico directo, no se requiere necesariamente un gráfico univariable dedicado. Los gráficos multivariable permiten monitorizar rutinariamente muchos parámetros del proceso de las herramientas con menos gráficos. El objetivo sería comprender mejor cuándo pueden utilizarse puntos fuera de control en un gráfico multivariable para prever problemas de calidad relativas a las características del producto.
Para controlar major un proceso, necesitamos evaluar cómo afectan los parámetros de las herramientas que vamos utilizando sobre el producto final. Los gráficos multivariable también son de gran utilidad para monitorizar medidas 3D. Identificar la razón por la que existe un punto fuera de control en un gráfico multivariable es un aspecto clave para utilizarlo con éxito.
- Detalles
- Categoría: NAG
- Visto: 5906

Este taller práctico, de tres días, está enfocado a los programadores de Fortran que quieran escribir código moderno o modernizar su código existente, para hacerlo más legible y fácil de mantener, alentando el uso de buenas prácticas de ingeniería del software. La adopción de buenas prácticas de software hace que los códigos sean más susceptibles a la optimización y paralelización, y el camino para que se conviertan en código para la comunidad, muchísimo más fácil.
Fechas: Lunes 24 de julio de 2017 a Miércoles 26 de julio de 2017 (taller de tres días)
Horario: 09:00 a 18.00 cada día
Localización: Sala C1001, Edificio C1, Campus Nord Universitat Politècnica de Catalunya (UPC), C/ Gran Capità, S/N 08034, Barcelona
Idioma: El taller será impartido en inglés
- Detalles
- Categoría: Comsol
- Visto: 3880

Róterdam, 18 - 20 octubre 2017
Conozca lo último en simulación numérica y diseño de aplicaciones multifísicas junto a otros ingenieros, investigadores y científicos en la Conferencia de COMSOL 2017 de Róterdam. Este completo evento de formación y colaboración cubrirá, entre otros muchos, los siguientes temas:
- Tecnología del núcleo: creación de la geometría, resolvedores, mallado, optimización y visualización
- Diseño y desarrollo de aplicaciones de simulación especializadas e intuitivas
- Simulación multifísica de varios campos de la ingeniería como aplicaciones mecánicas, acústicas, flujo de fluido, transferencia de calor, eléctrica y químicas