- Detalles
- Categoría: Minitab
- Visto: 7860

por Eston Martz
Cualquiera que sea la industria en la que Vd. esté, va a necesitar comprar suministros. Si es un impresor necesitará comprar tintas, varios tipos de equipos de impresión y papel. Si está en producción, necesitará obtener piezas que no fabrique por sí mismo.
Pero ¿cómo saber que está realizando la elección correcta cuando dispone de múltiples proveedores que rivalizan para cumplir su pedido? ¿Cómo puede estar seguro de que está escogiendo al fabricante con la mejor calidad, o eliminando al proveedor cuyos productos no alcanzan sus expectativas?
Vamos a ver un ejemplo de producción en el ámbito de la automoción para ver como podemos utilizar los datos para tomar una decisión informada sobre las opciones.
- Detalles
- Categoría: Maple
- Visto: 14622

MapleCloud ahora está en línea en maplecloud.maplesoft.com. Además de acceder al contenido de MapleCloud desde el propio Maple, ahora se puede utilizar un navegador web para ver e interactuar con documentos MapleCloud. El nuevo MapleCloud en línea está basado en HTML5 y funciona en un amplio rango de navegadores. No se necesitan ni plugins ni Java.
MapleCloud se introdujo por primera vez hace cinco años, en Maple 14, y ha permitido que los usuarios de Maple de todo el mundo compartieran su hojas de trabajo y Math Apps con otros usuarios o socios. Maple Cloud permite crear grupos para compartir contenidos con gente específica, como también compartirlos públicamente. Hoy en día contamos con más de 1400 de estos grupos que han sido creados para una clase un proyecto o un grupo de trabajo, albergando decenas de miles de hojas de trabajo de Maple, con miles de hojas de trabajo subiéndose y descargándose cada mes. La información de retorno ha sido tremenda, y claramente, esta funcionalidad ha tocado el nervio de nuestra comunidad de usuarios y ha generado un importante seguimiento.
Un uso habitual es la configuración de un grupo MapleCloud para una clase para poder intercambiar material de Maple entre los estudiantes y los profesores. Algunos profesores lo están utilizando como principal mecanismo para presentar y evaluar tareas. También es igual de típico usar MapleCloud como una manera adecuada para intercambiar y revisar documentos mientras se trabaja en un proyecto conjunto. Muchos usuarios también utilizan la nube para almacenar sus propios documentos en un espacio en línea privado de forma que pueden acceder a ellos desde múltiples localizaciones u ordenadores. Dondequiera que tengan acceso a Maple, también tienen acceso a todos sus documentos Maple.
Luego, también existen los grupos públicos en MapleCloud, donde usuarios de todo el mundo comparten libremente aplicaciones y ejemplos; es un tesoro escondido de material que trata todo tipo de temas desde cálculo a fractales.
Ahora en línea, MapleCloud continúa siendo un gran repositorio para contenido de Maple, pero además, también existen otros nuevos aspectos adicionales. Para los que empiezan, es realmente fácil compartir una hoja de trabajo de Maple o una Math App con alguien simplemente dándole una URL. Al hacer clic sobre él la hoja de trabajo de Maple se obre en el navegador web y todos los componentes interactivos y gráficos cobran vida - se pueden cambiar parámetros, calcular nuevos resultados y actualizar los gráficos. Por ejemplo, puede probar una herramienta de claves de seguridad o explorar el vértice de una parábola. Maple no es necesario para consumir contenido de esta manera. Pero si se dispone de Maple, con otro clic se podrá descargar el documento en su copia local de Maple, y podrá modificarlo y ampliarlo.
MapleCloud online es una gran manera de gestionar sus documentos y compartir contenido de Maple con alumnos y colegas. Esto, por supuesto, es solo uno más de los pasos para hacer toda nuestra tecnología disponible en línea y podrá comprobar los nuevos avances a lo largo de estos meses.
- Detalles
- Categoría: Comsol
- Visto: 4720
Esta actualización corrige algunos errores y problemas de estabilidad de la versión 5.1 de COMSOL Multiphysics, COMSOL Server y COMSOL Client. También posibilita correr COMSOL 5.1 en Windows® 10.
Si ya está utilizando Windows 10 o ha actualizado a Windows 10, además de aplicár esta actualización también deberá aplicar COMSOL 5.1 Hotfix for Windows® 10. Si realiza una instalación completa de COMSOL 5.1 utilizando la última descarga (incluye los contenidos de Update 3), no será necesario el Hotfix. Esto aplica tanto si ya ha instalado Windows 10 como si planea hacerlo más adelante.
La actualización es acumulativa; o sea, se aplica a la versión 5.1, a la versión 5.1 Update 1, y a la versión 5.1 Update 2, e incluye todas las actualizaciones de las actualizaciones Update 1 y Update 2.
- Detalles
- Categoría: Comsol
- Visto: 4584
¿Está interesado en conocer cómo los líderes de la industria de todo el mundo están diseñando sus productos y construyendo aplicaciones de simulación? La última edición de Multiphysics Simulation ofrece un vistazo entre bastidores a proyectos de simulación innovadores de empresas como WiTricity, donde los ingenieros están revolucionando la transferencia de energía inalámbrica, o cómo el equipo de I+D en Cypress Semiconductor está utilizando las apps de simulación como nueva línea de comunicación entre los expertos en modelado y el resto del equipo de producción. Puede leer todas las exitosas historias de los clientes o descargarse el pdf, a través del enlace más abajo.
Campos temáticos:
|
|
Imagen de la portada cortesía de WiTricity.
- Detalles
- Categoría: Comsol
- Visto: 4795
En el diseño de productos, la simulación se valora como una alternativa viable a los flujos de trabajo tradicionales de prueba y error. Sin embargo, experimentar los beneficios de la simulación ha demostrado ser difícil para algunas organizaciones debido a la tecnología, el personal y los desafíos culturales. Los recientes avances en hardware y software de simulación están cambiando esto, haciendo que el diseño basado en la simulación sea una opción más accesible.
Este libro blanco destaca estos recientes acontecimientos y la forma en que están llevando el poder de simulación a un público más amplio.
Haga clic en el enlace de abajo para navegar a través del libro blanco.
- Detalles
- Categoría: Comsol
- Visto: 4173
Les recordamos que la fecha límite para el envío de resúmenes para la Conferencia Europea de COMSOL (Grenoble 2015) es el próximo viernes, 31 de julio. Todos los ponentes incluídos los coautores recibirán un precio reducido para el registro a la conferencia
Para enviar el resumen/abstract en línea, visite esta web.
- Detalles
- Categoría: MapleSim
- Visto: 11791

Aplicación de técnicas modernas para reducir drásticamente el tiempo de desarrollo del modelo, proporcionando una mayor comprensión del comportamiento del sistema, y producir simulaciones rápidas de alta fidelidad.
Nao es un pequeño robot humanoide creado por Aldebaran Robotics. Con una altura de 58 cm, Nao es utilizado para enseñar programación a los estudiantes de todo el mundo y para dar a los ingenieros y desarrolladores de software una plataforma para experimentación y aplicaciones robóticas. ¡Nao fue incluso adoptado recientemente por una institución financiera en Japón para utilizarlos como cajeros de banco!
Los ingenieros de Maplesoft decidieron ver si podían crear un modelo de Nao en MapleSim, el avanzado sistema de modelado a nivel de sistema y herramienta de simulación que aplica técnicas modernas para reducir drásticamente el tiempo de desarrollo de modelos, proporcionando una mayor comprensión del comportamiento del sistema, y produciendo rápidas simulaciones de alta fidelidad.
Construcción del modelo
Nao es un mecanismo multicuerpo de gran complejidad con 25 grados de libertad. Utilizando la librería multicuerpo de MapleSim, los ingenieros de Maplesoft crearon un modelo utilizando la convención de Denavit-Hartenberg (DH) para definir los marcos de coordenadas de las articulaciones del robot. Entonces se importaron los modelos CAD para definir la masa del cuerpo, la inercia rotacional y el centro de masas. Como que MapleSim es un sistema de modelado físico, el diagrama del modelo se corresponde en gran medida con el sistema físico en sí, como se puede observar en la Figura 1.
En cada articulación aparecen servomotores para gestionar el movimiento. Las señales del controlador activan el motor para reposicionar cada articulación. En combinación, estos servomotores individuales determinan como se mueve Nao.
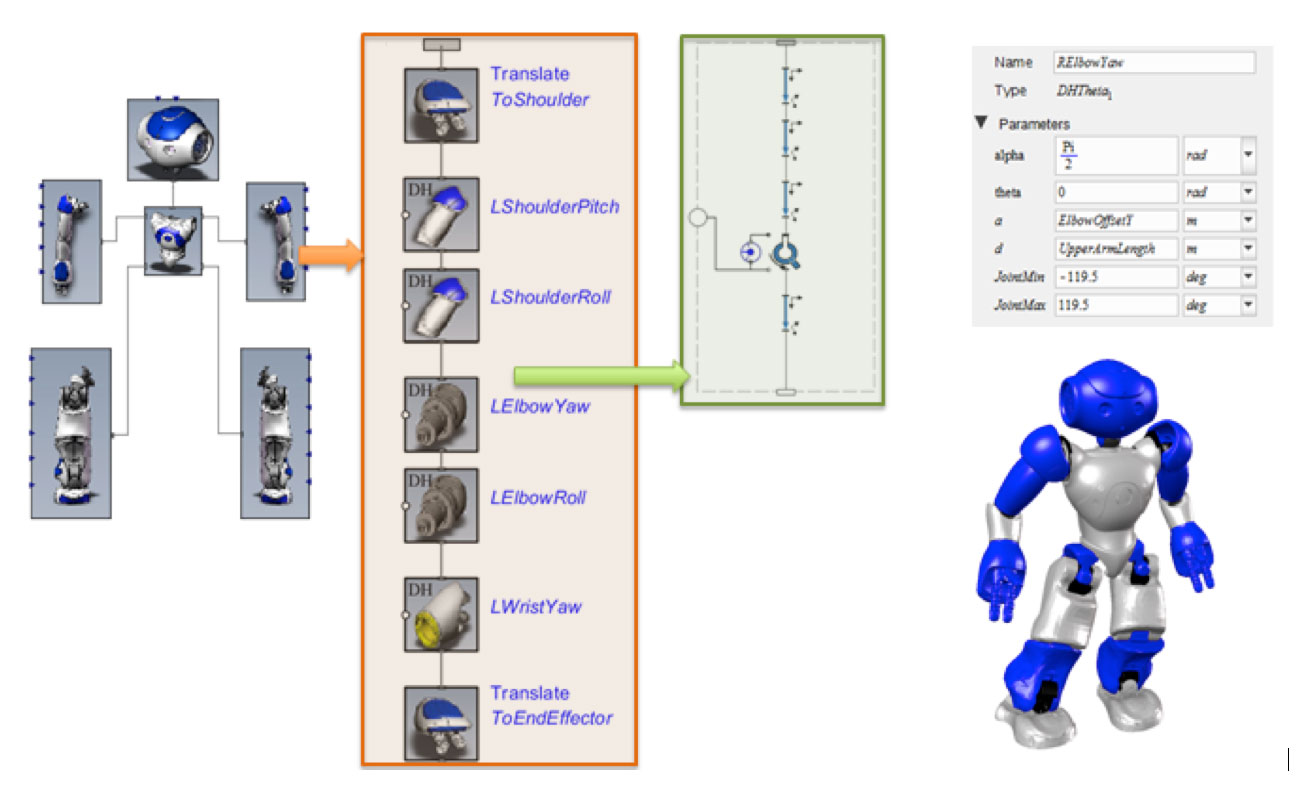
Figura 1. Modelo multicuerpo del robot Nao
Los ingenieros también fueron capaces de modelar el contacto entre el pie de Nao y el suelo. Esto se realizó creando componentes personalizados en MapleSim, y proporcionándoles las ecuaciones matemáticas que gobiernan la fricción y la fuerza normal. Estos componentes se incluyeron en el modelo en cada punto de contacto en la base de cada pie.
El modelo de MapleSim también incluye un modelo de paquete de baterías de ión de Litio de la librería de baterías de MapleSim que alimenta el motor, de forma que el comportamiento de la batería y sus interacciones con el resto del sistema también pueden ser modelados.
Las lecturas del sensor de cada articulación se exportaron desde Aldebaran Robotics Choregraphe™ a MapleSim a través de una tabla de consultar temporal. Entonces se utilizaron como la señal de comando para cada articulación. El modelo respondió del mismo modo que lo hacía el robot físico. Por ejemplo, el modelo de MapleSim puede realizar Tai Chi tan hábilmente como su contrapartida física.
Enseñar nuevos trucos a Nao
Ahora que tenían un modelo que simulaba los movimientos del robot Nao, los ingenieros de Maplesoft entonces quisieron ver si no solo podían simular su comportamiento con precisión, sino también enseñarle a hacer algo nuevo.
Utilizando la capacidad de MapleSim para extraer y analizar las ecuaciones matemáticas de movimiento de un modelo, así como sus herramientas de análisis multicuerpo, determinaron la solución simbólica para invertir el problema cinemático para el movimiento del brazo del robot. Con esta solución, podrían calcular los movimientos de articulación necesarios para posicionar el brazo en una posición arbitraria en el espacio. Utilizaron esta información para añadir un nuevo componente personalizado al modelo que tomaba la posición final deseada y calculaba los movimientos necesarios para alcanzarla. Entonces, enseñaron al Nao virtual a dibujar.
Crearon una aplicación que permitía al humanoide dibujar una forma, imagen, o palabra utilizando un ratón. El dibujo es analizado para determinar las coordenadas de las líneas, y entonces la información es volcada en el modelo de simulación. ¿Cuál fue el resultado? ¡Nao mueve su brazo y dibuja la misma cosa!
Además, aprovechando la capacidad de MapleSim de resolver problemas cinemáticos inversos, los ingenieros de Maplesoft también han enseñado a Nao otros nuevos trucos, incluyendo varios tipos de bailes, jugar al voleibol, y el seguimiento de un cuadrocóptero.
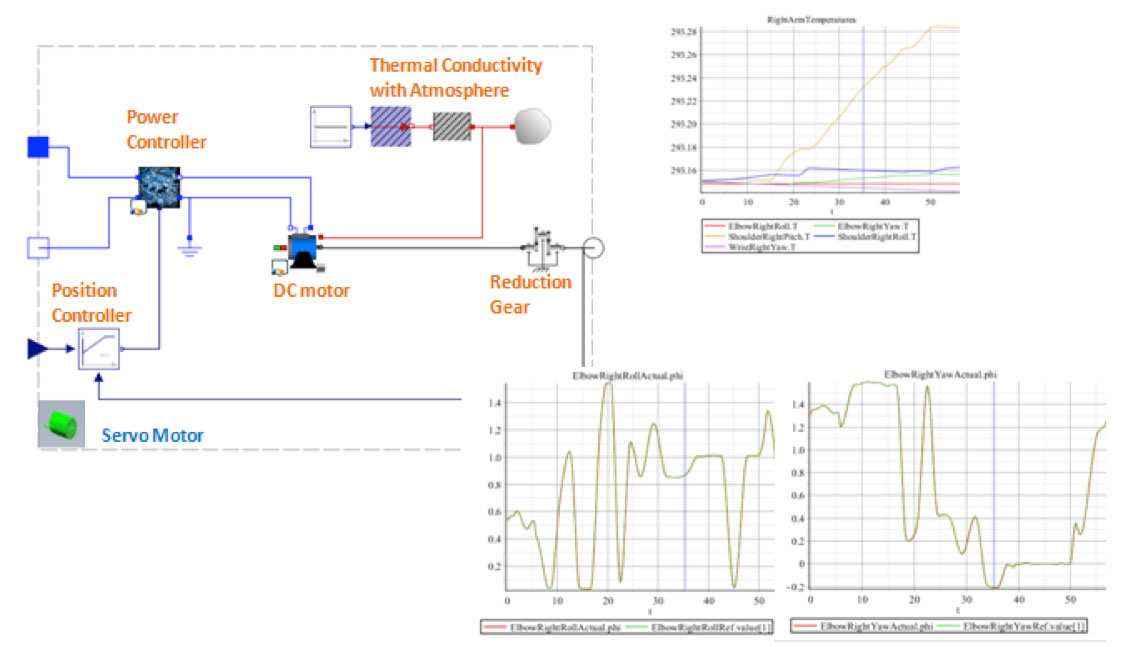
Figura 2. Servomotores para cada articulación que dirigen el movimiento del brazo del robot
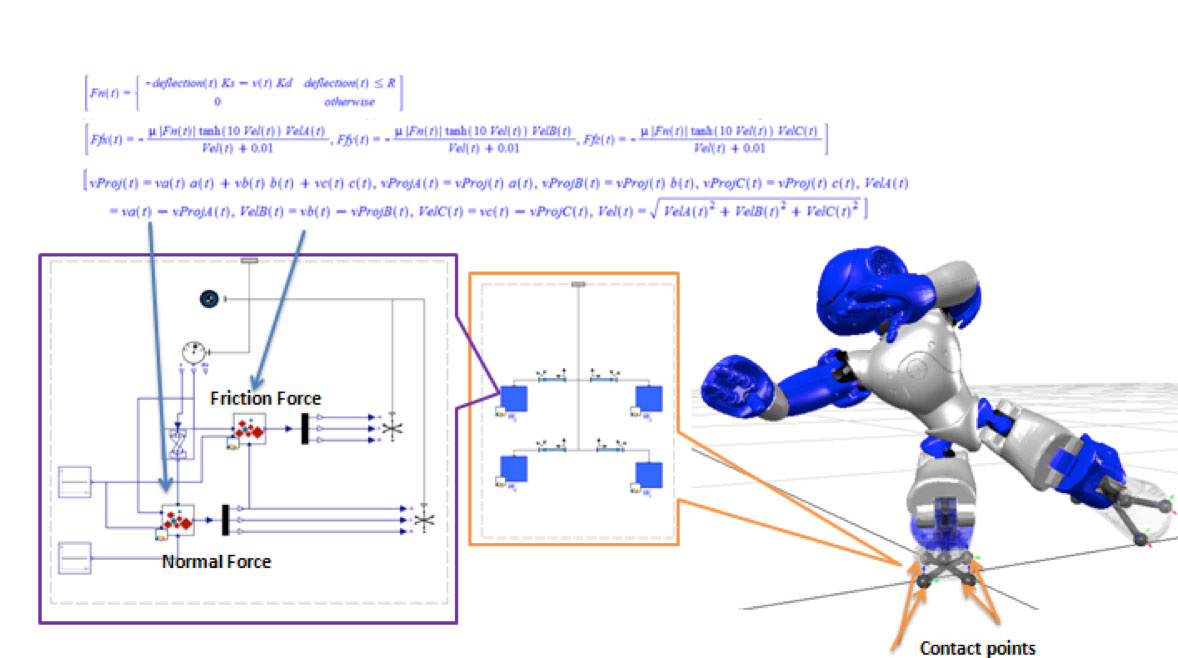
Figura 3. Se utilizaron componentes personalizados basados en ecuaciones para modelar los puntos de contacto entre el pie y el suelo
¿Por qué ésto tiene interés?
Si está trabajando en una investigación de robótica o en un proyecto de diseño donde es importante comprender las interacciones multidominio, entonces utilizar una plataforma de modelado multidominio como MapleSim, como demuestra este ejemplo, permitirá juntar todos los aspectos del proyecto en un único lugar.
- Modelado multicuerpo 3D: Aprovecha las funcionalidades de modelado multicuerpo 3D, simulation y visualización
- Modelos parametrizados: Acceso conveniente a los parámetros del sistema para aplicar rápidamente los cambios del diseño y considerar una familia de diseños o productos
- Soporte multidominio: Aumenta el sistema mecánico dinámico con modelos precisos de motores eléctricos, controladores y baterías
- Pruebas y análisis virtuales: Investiga el comportamiento a nivel de sistema e interacción de subsistemas multidominio, sin la necesidad de construir prototipos físicos caros e impredecibles
- Dimensionado de componentes: Corre fácilmente lotes de simulación y procesado en paralelo, y recoge datos que pueden ser utilizados para asistir en el dimensionado de componentes
- Acceso completo: Aprovecha el acceso directo a las ecuaciones y un lenguaje de programación completo para ampliar el mismo modelo de simulación para que sea parte de las tareas del diseño del diseño y optimización de trayectoria
- Generación de código optimizada: Genera código c muy optimizado desde el modelo para una parte esencial del diseño de control basado en el modelo
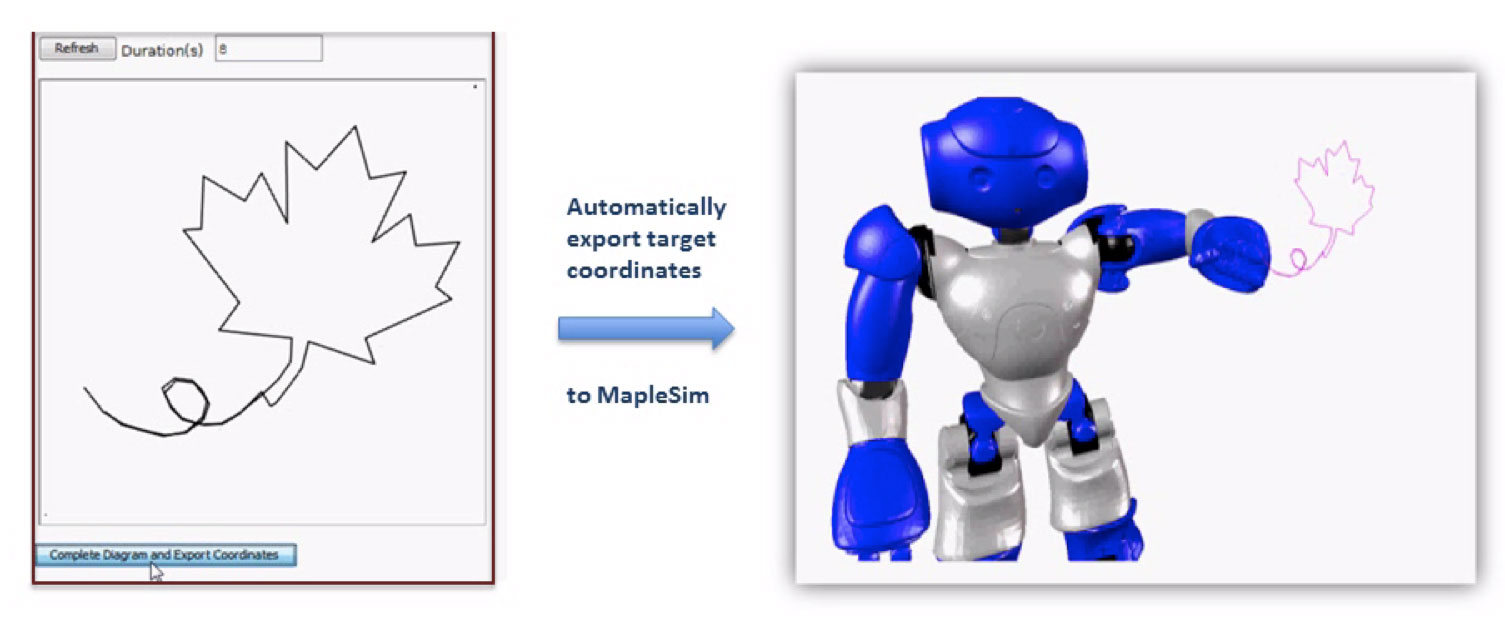
Figura 4. Se utilizó cinemática inversa para enseñar a dibujar al modelo de Nao